

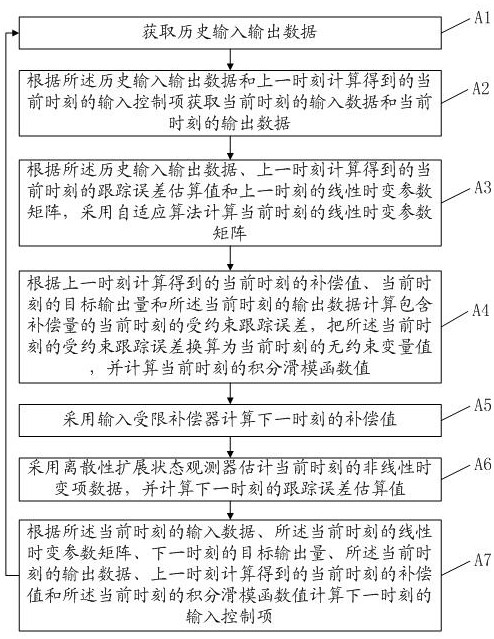
Data-driven integral sliding mode constrained control method based on full-form dynamic linearization
An integral sliding mode, data-driven technology, applied in the direction of adaptive control, general control system, control/adjustment system, etc., can solve the problem of poor steady-state performance of tracking error, etc., to eliminate offset error, suppress disturbance, and enhance stability sexual effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0200] For a steam-water heat exchanger system, which is a discrete nonlinear system with external disturbances and input constraints, it is expressed as:
[0201] ;
[0202] in, for the first The output data at time (specifically the output temperature), for the first Input data at time (specifically input power), for the first The intermediate parameter of the moment.
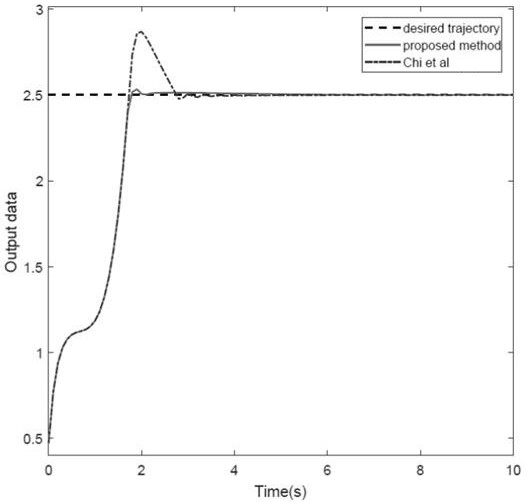
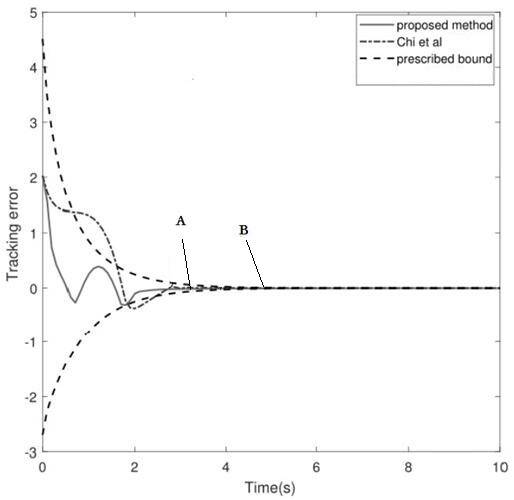
[0203] Suppose the tracking target is , that is, the target output at any time Both are 2.5; the external disturbance is , where t is time, is the disturbance value, for the external disturbance value at time k , is the sampling period; the value of the preset function parameters involved is 0.11, is 2.7, for ; Boundary convergence constant is 0.2, the initial value and 1.672 and 1, respectively; the correction constant is 0.5; the initial value of the compensation value is 0; the input amplitude and input rate of the system are subject to the following constraints...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More