Control method and device for upper and lower limb coordinated active rehabilitation robot
A rehabilitation robot, coordinated motion technology, applied in non-electric variable control, control/regulation system, two-dimensional position/channel control, etc., can solve the problems of difficult control, complex structure, lack of active participation of patients, etc., to reduce work Intensity, the effect of promoting the recovery process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
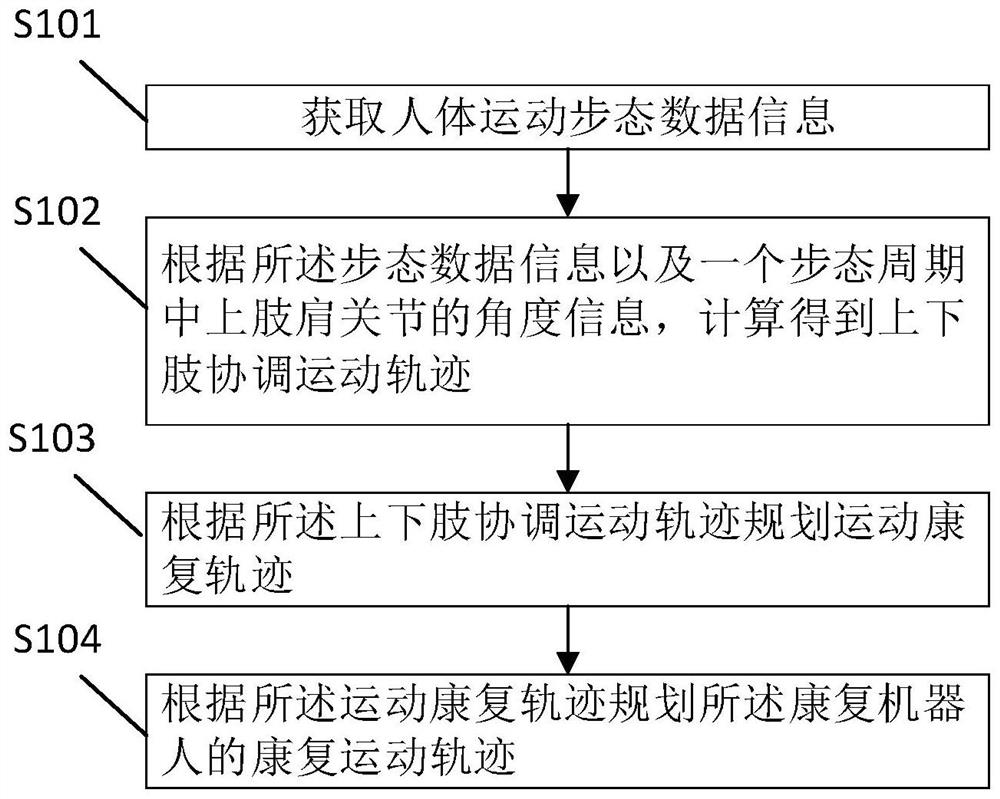
[0059] figure 1 It is a flow chart of a control method for an active rehabilitation robot with upper and lower limb coordination provided in an embodiment of the present invention, and the method involves. Such as figure 1 As shown, this nearly upper and lower limbs coordination active rehabilitation robot control method comprises the following steps:
[0060] Step S101 acquires human body motion gait data information;
[0061] Specifically, firstly, the human motion gait data information is obtained from the CGA human gait database, and the database includes angle information of hip joints, knee joints, and ankle joints within a gait cycle.
[0062] Step S102, according to the gait data information and the angle information of the shoulder joint of the upper limb in a gait cycle, calculate and obtain the coordinated movement trajectory of the upper and lower limbs;
[0063] In order to realize the requirement of multi-joint coordinated control, the present invention adopts...
Embodiment 2
[0103] Figure 11 It is a structural diagram of an upper and lower limb coordination active rehabilitation robot control device in an embodiment of the present application, including:
[0104] Obtaining module 111, is used for obtaining human body movement gait data information;
[0105] Calculating motion trajectory module 112, used to calculate and obtain the coordinated motion trajectory of upper and lower limbs according to the gait data information and the angle information of shoulder joints of upper limbs in a gait cycle;
[0106] Planning exercise rehabilitation trajectory module 113, used for planning exercise rehabilitation trajectory according to the coordinated movement trajectory of upper and lower limbs;
[0107] The rehabilitation trajectory planning module 114 of the robot is configured to plan the rehabilitation trajectory of the rehabilitation robot according to the rehabilitation trajectory.
[0108] The specific working process of the acquisition module 1...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com