

Hand key point space coordinate acquisition method based on binocular vision
A technology of spatial coordinates and acquisition methods, which is applied in computer components, image data processing, instruments, etc., can solve the problems of three-dimensional spatial coordinate errors, low detection accuracy, and insufficient feature extraction of smooth edge targets, etc., to achieve accurate key points, Improved accuracy and precise hand shape reconstruction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0059] In order to make the purpose, technical solutions and advantages of the embodiments of the present invention clearer, the technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the drawings in the embodiments of the present invention. Obviously, the described embodiments It is a part of embodiments of the present invention, but not all embodiments. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
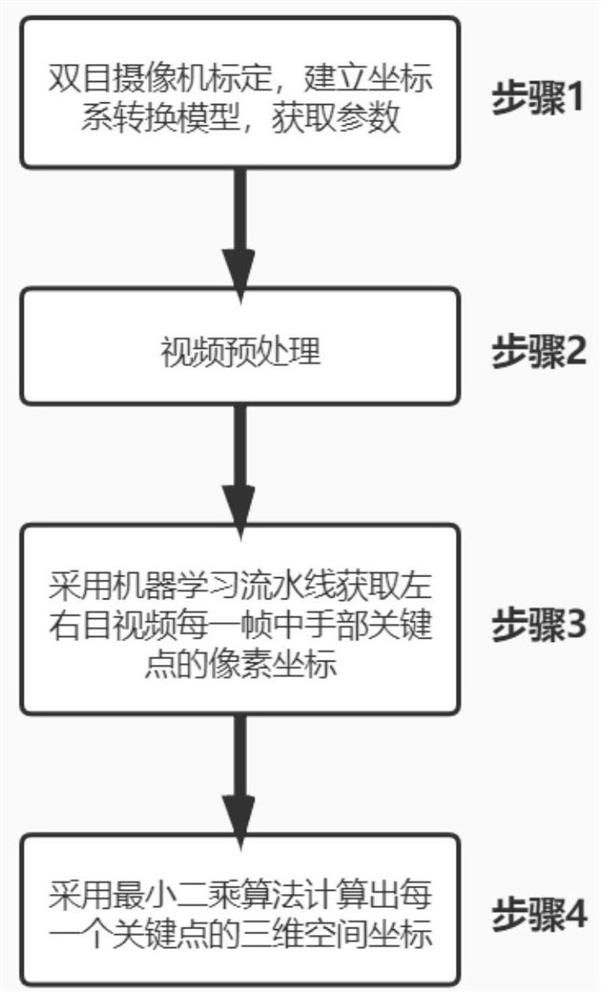
[0060] The present invention does not require a specific operating environment, the hardware device only needs a computer and a binocular camera, figure 1 It is a flow chart of steps in a preferred embodiment of the binocular vision-based hand key point spatial coordinate acquisition method provided by the present invention. First, the two ca...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More