Rigid-flexible coupling type microgravity environment simulation training device
A technology of environment simulation and training equipment, which is applied to the simulation equipment of space navigation conditions, simulators, transportation and packaging, etc., which can solve the problems of low control precision, difficult to control size, complex mechanical structure, etc., to improve position control accuracy, Improved control accuracy and simple mechanical structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The following is attached figure 1 - attached Figure 8 The present invention will be further described in detail with specific examples, and the specific examples described here are only used to explain the present invention, and are not intended to limit the present invention.
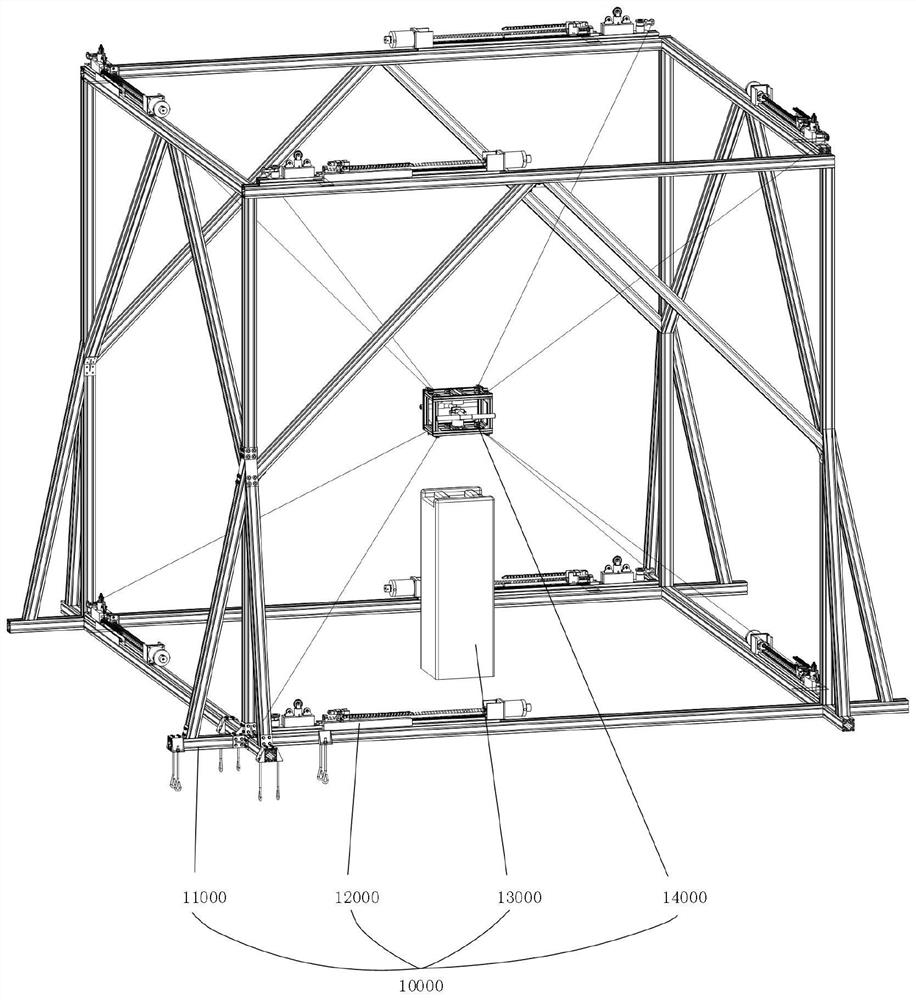
[0024] Refer to attached figure 1 And attached Figure 5As shown, a rigid-flexible coupled microgravity environment simulation training device includes a fixed platform 11000, a flexible cable drive unit 12000, an end effector 14000 and an end effector bracket 13000, and the four sides of the upper and lower planes of the fixed platform 11000 A flexible cable drive unit 12000 is arranged on each, and the flexible cable drive unit 12000 includes a ball screw 12006 and a ball screw nut 12012, a left bearing seat 12003 arranged on the left end of the ball screw 12006 through a ball bearing, and a left bearing seat 12003 arranged on the left end of the ball screw through a ball bearing. The rig...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More