

Rigid-flexible coupling active and passive deformation flapping wing mechanism and attack angle adjusting method
A technology of rigid-flexible coupling and deformation mechanism, which is applied in the field of flapping-wing robots, can solve the problems of non-adjustable amplitude and speed, and achieve the effect of improving aerodynamic performance, energy utilization efficiency and flight flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
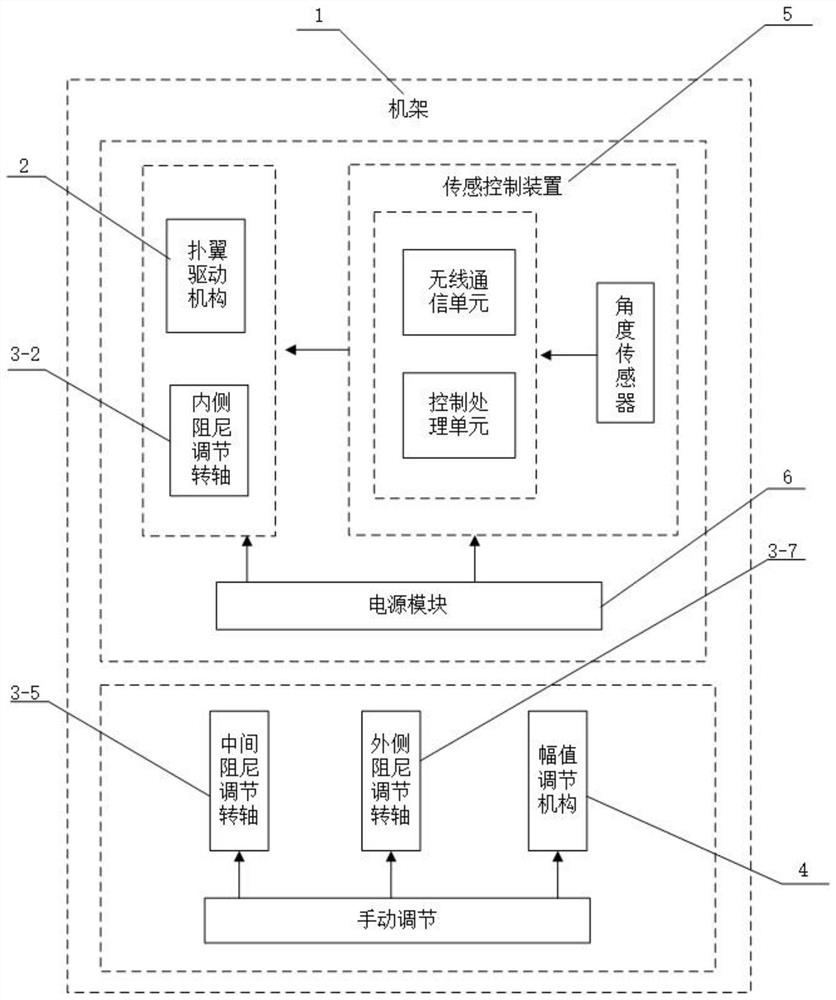
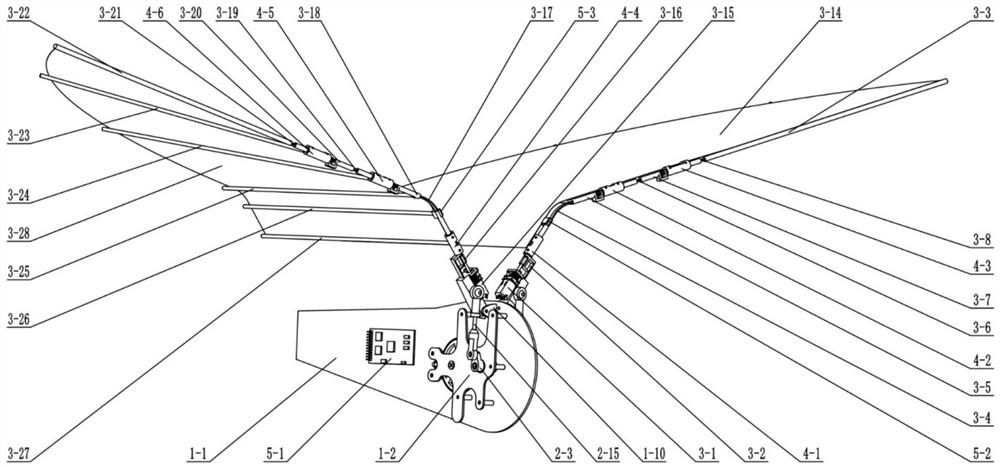
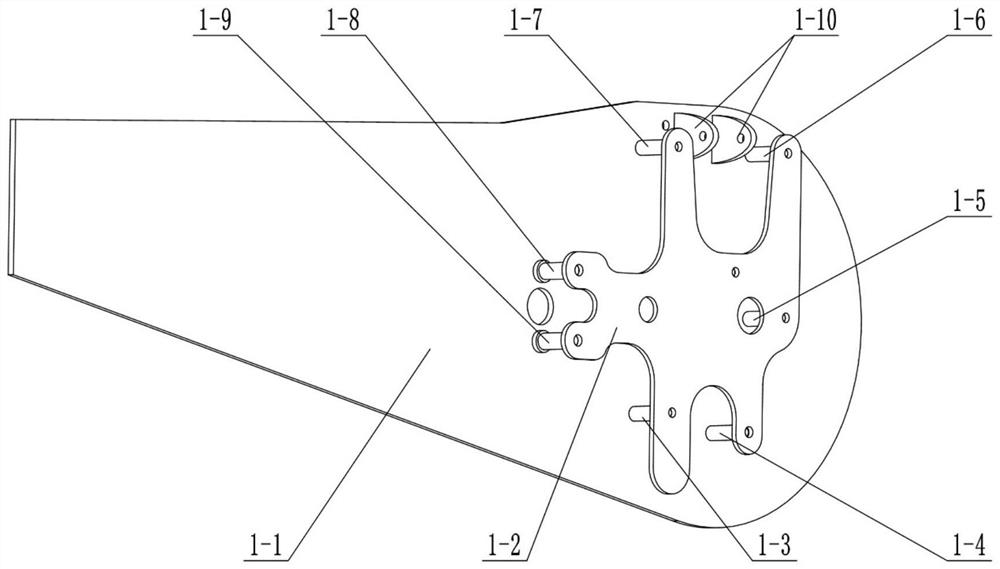
[0042] refer to figure 1 , figure 2 and Figure 6 An active and passive deformation flapping wing mechanism consists of a frame 1, a flapping wing drive mechanism 2, a variable damping flapping wing deformation mechanism 3, an amplitude adjustment mechanism 4, a sensor control device 5, and a power supply module 6. The frame 1 is used for installing and fixing the above-mentioned mechanisms, devices and modules. The flapping wing driving mechanism 2 drives the flapping of the wings to realize the flying function of the flapping wing robot. The variable damping flapping wing deformation mechanism 3 can realize the adjustment of the wing deformation damping and the angle of attack, and the amplitude adjustment mechanism 4 can realize the adjustment of the flapping wing deformation amplitude. value adjustment, the sensor control device 5 realiz...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More