

Local path planning method and system for unmanned vehicle
A technology for local path planning and unmanned vehicles, applied in vehicle position/route/height control, control/regulation systems, motor vehicles, etc., can solve problems such as uneven turning, achieve stable acceleration and speed changes, and improve stability performance, smooth running status
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0062] Embodiment 1 of the present invention proposes a local path planning method for unmanned vehicles. Specific steps are as follows:
[0063] First, establish a sports equation
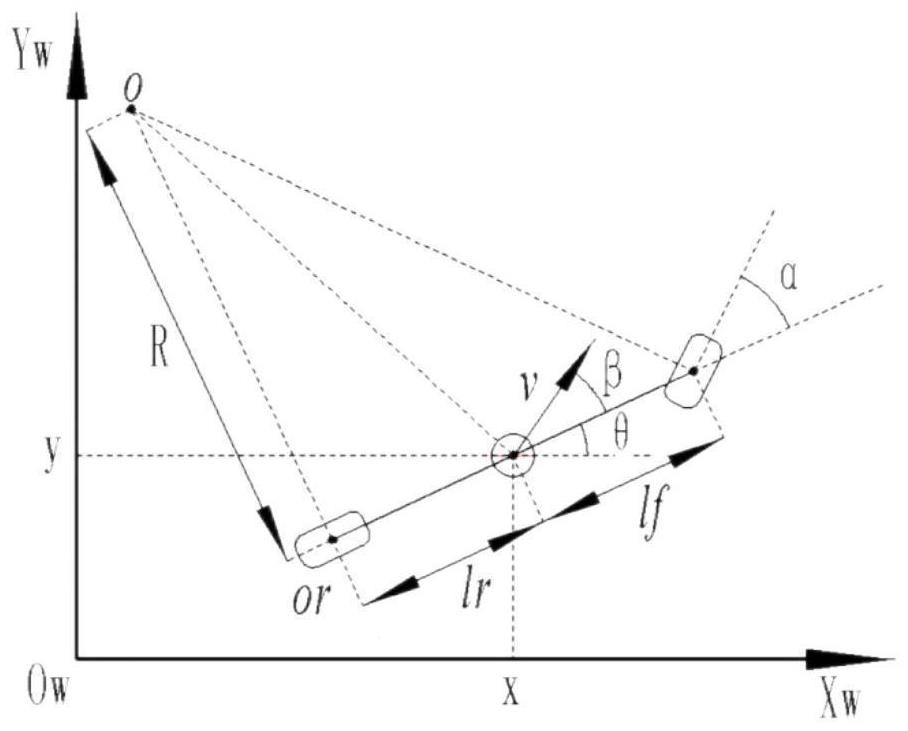
[0064] Such as figure 1 As shown, the world coordinate is X W O W Y W The base-sitting system is set to the rear axle center of the simplified operation model, X, Y is the coordinate of the vehicle in the world coordinate system, O is the instantaneous rotation center of the motion model, or the back wheel center, V is the vehicle rear axle center speed However, θ is the rope angle (navigation angle) of the vehicle, α is the front wheel virtual steering angle, and β is the steering angle at which R is the turn radius, the front wheel and the rear wheel to the vehicle centers are L. f And L r , L is the wheelbase, equal to L f And L r Sum.
[0065] From inhomatology,
[0066]
[0067] t Represents the current movement time, R min Indicates the minimum turn radius, ω is the front wheel corner speed.
...
Embodiment 2
[0116] Embodiment 2 of the present invention proposes a local path planning system for driverless vehicles, based on the combined navigation sensor implementation, using the method of the first embodiment, including: motion model establishment module, positioning information acquisition module, cost Function establishment module and dynamic adjustment module; where
[0117] The motion model establishes a module for establishing a kinematic equation in the world coordinate system, and the speed and corner of the vehicle movement are independent, establish a motion model;
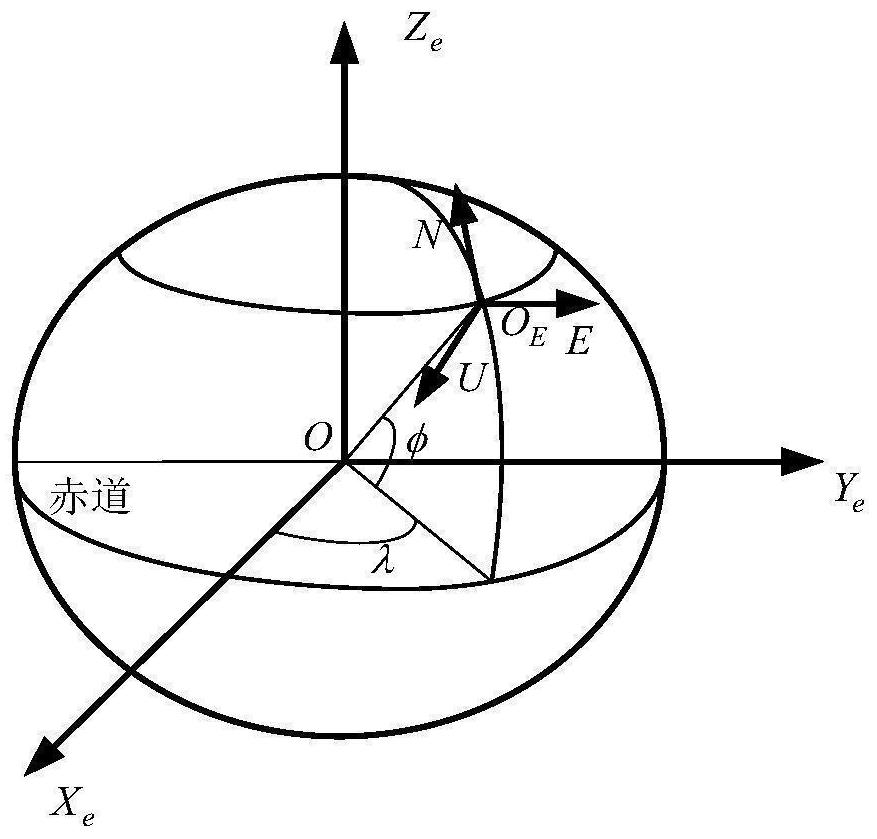
[0118] The positioning information acquisition module is configured to convert the data acquired by the combined navigation sensor to the navigation coordinate system based on real-time carrier phase dynamic differential techniques, providing positioning information for vehicle operation;
[0119] The cost function establishes a module for two aspects of time and bit posture, and establish a multi-objective cost ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More