

Oral implant robot one-drill hole preparation operation method based on real-time temperature sensing
A technology of real-time temperature and operation method, applied in the field of non-disease treatment, can solve the problems of no temperature sensing function, excessive heat production, and the temperature of bone tissue in the cavity exceeds 47°C, which is conducive to collection and backfilling and reuse. The effect of reducing the risk of bone tissue burns and improving the efficiency of hole preparation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The present invention will be further described below in conjunction with the accompanying drawings.
[0041] refer to Figure 1 to Figure 9 , a method of drilling and preparing holes for an oral implant robot based on real-time temperature sensing, comprising the following steps:
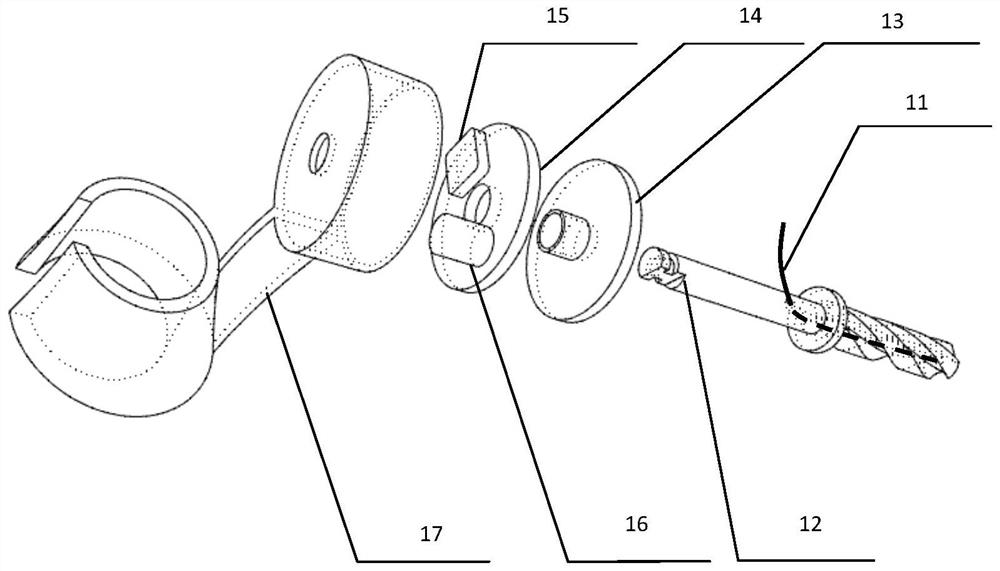
[0042] 1) Temperature sensing drill selection
[0043] Choose the diameter and length of the temperature-sensing drill according to the implant model in the implant plan. Temperature-sensing drills with different diameters will affect the heating rate of the heat source in the temperature field model;
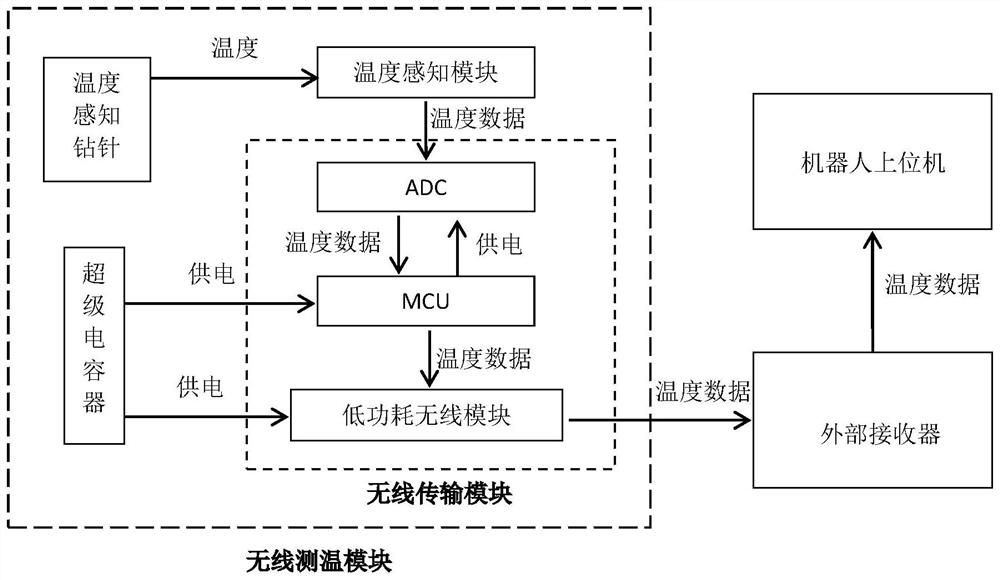
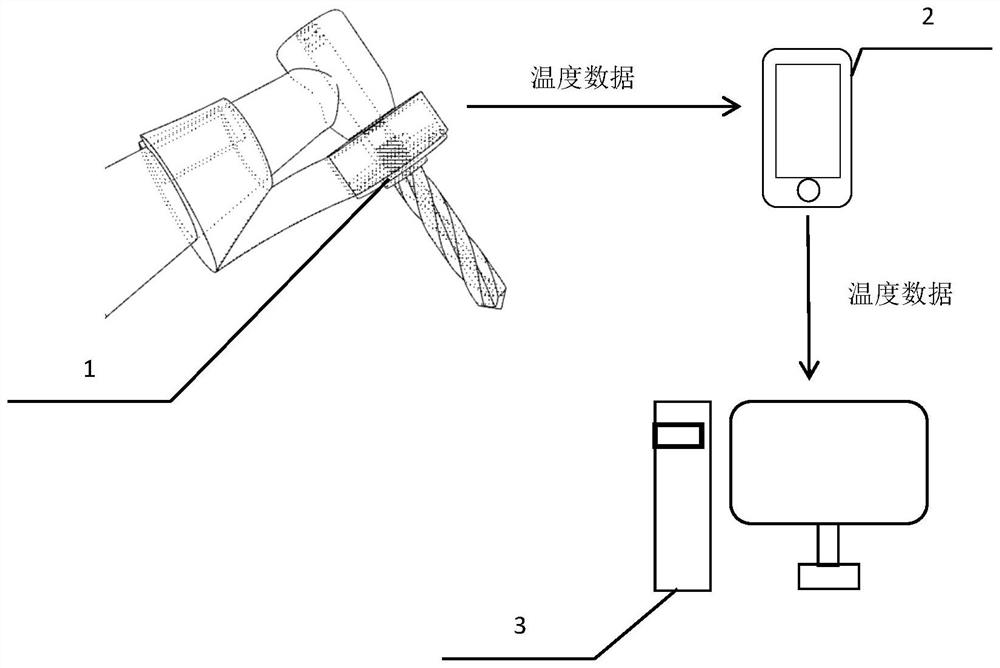
[0044] 2) Wireless temperature measurement module installation
[0045] Install the wireless temperature measurement module on the planting phone and check the stability of the connection;
[0046] 3) Wireless temperature measurement module transmission test
[0047] Power on the wireless temperature measurement module before preparing the hole, and at the same time start the planting mob...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More