Unmanned aerial vehicle ground target positioning method based on different-source image matching
A technology of heterogeneous images and ground targets, which is applied in the field of UAV ground target positioning based on heterogeneous image matching, can solve the problems of affecting the accuracy of target positioning and the inability to obtain its own accurate position, and achieve strong anti-electromagnetic interference ability and implementation Convenience and easy operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, and are not intended to limit the present invention. In addition, the technical features involved in the embodiments of the present invention described below may be combined with each other as long as they do not conflict with each other.
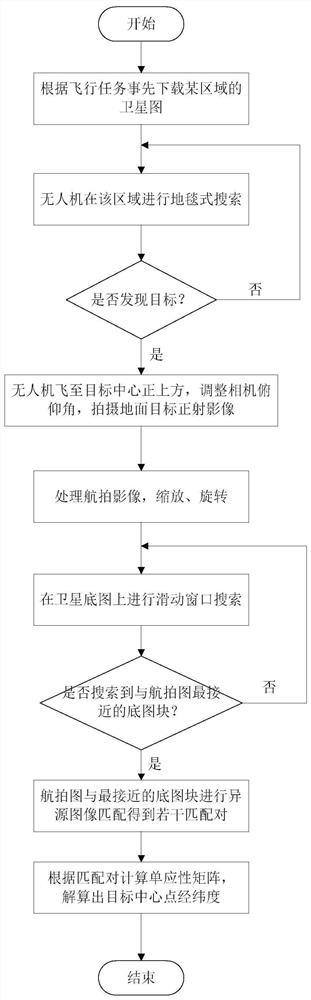
[0041] Such as figure 1 As shown, the present invention provides a UAV ground target positioning method based on heterogeneous image matching, comprising the following steps:
[0042] S1. According to the flight mission of the UAV, obtain the high-resolution remote sensing satellite image of its flight area from the Internet. Each pixel on the satellite image has accurate latitude and longitude...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More