

Three-axis acceleration sensor correction method
A technology of axis acceleration and correction method, which is applied in the testing/calibration of speed/acceleration/shock measurement equipment, speed/acceleration/shock measurement, instruments, etc., which can solve the difficulty of batch calibration calculation and sample data acquisition of three-axis acceleration sensors. Large size, extremely high sample data requirements, etc., to achieve the effect of fast calculation speed, low cost and high accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
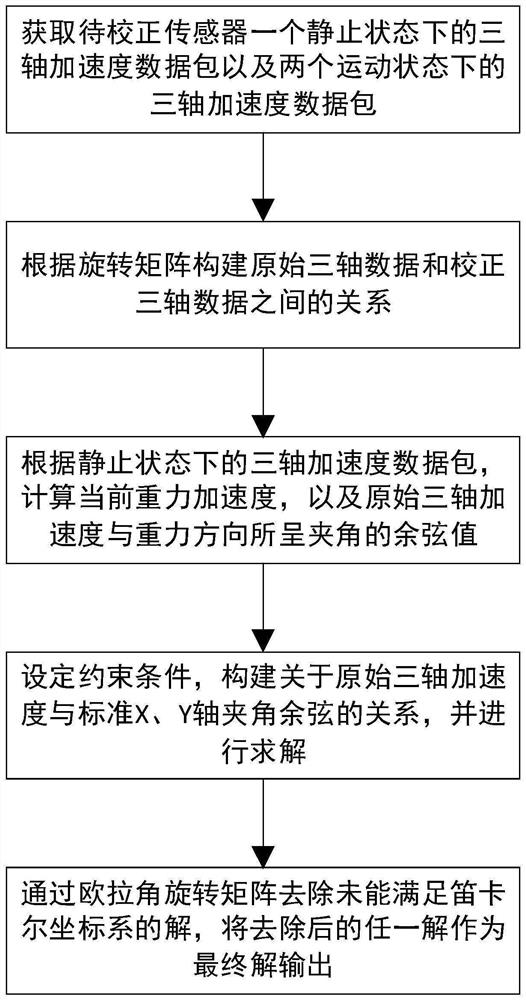
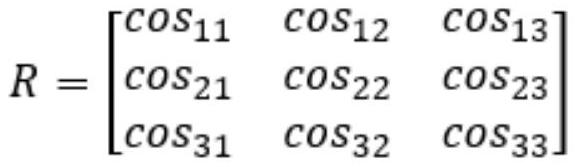
[0031] Embodiment 1 of the present invention discloses a three-axis acceleration sensor calibration method, which is based on the gravity reference calibration and the correction coefficient solution algorithm of random motion point data. The three-axis acceleration data package in the motion state, based on the vector summation operation, solves the angle between the original three-axis acceleration of the sensor and the three-axis acceleration under the standard attitude, a total of nine correction coefficients, and calculates the rotation matrix And the way of associating other speed change point data packets to filter out the correct correction coefficient.
[0032] In this embodiment, a three-axis acceleration sensor mounted on a vehicle is taken as an example for illustration;
[0033] Define the positive direction of the x-axis of the three-axis acceleration sensor after correction as the forward direction of the vehicle, the positive direction of the y-axis as the left...
Embodiment 2
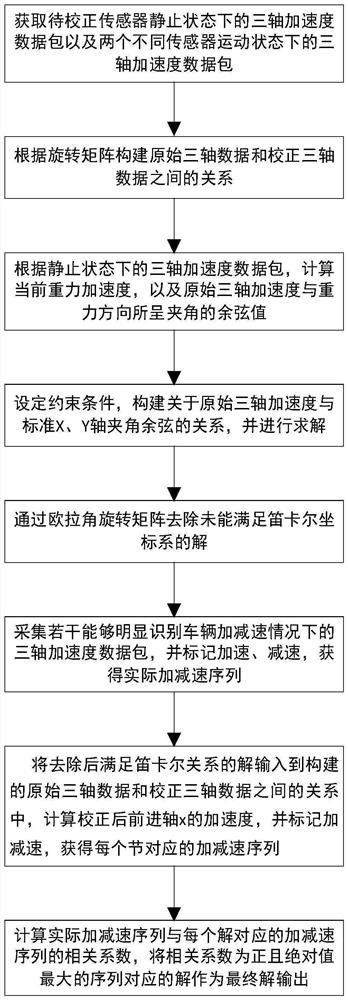
[0104] Embodiment 2 of the present invention discloses a three-axis acceleration sensor calibration method, such as figure 2 As shown, it includes S1-S6, wherein the specific content of steps S1-S5 is as described in the above-mentioned embodiment 1, and will not be repeated here.
[0105] Similarly, the data parameters in the above-mentioned embodiment 1 are still used for description.
[0106] In this embodiment, step S6 is disclosed: verifying the shifting direction according to the forward direction of the vehicle, and outputting the verified correct solution as the final correction coefficient; the details are as follows:
[0107] Collect 30 or more data packets, which can clearly identify the three-axis acceleration data packets in the case of vehicle acceleration and deceleration, and mark the acceleration or deceleration. The acceleration is recorded as 1, and the deceleration is recorded as -1, and the actual value containing the marked value is obtained. Accelerati...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More