

Unmanned aerial vehicle group flight path optimization method for multi-radiation source tracking
A technology of flight trajectory and optimization method, applied in neural learning methods, mechanical equipment, combustion engines, etc., can solve problems such as huge channel environment action and state space, strong algorithm randomness, and inability to solve efficiently
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
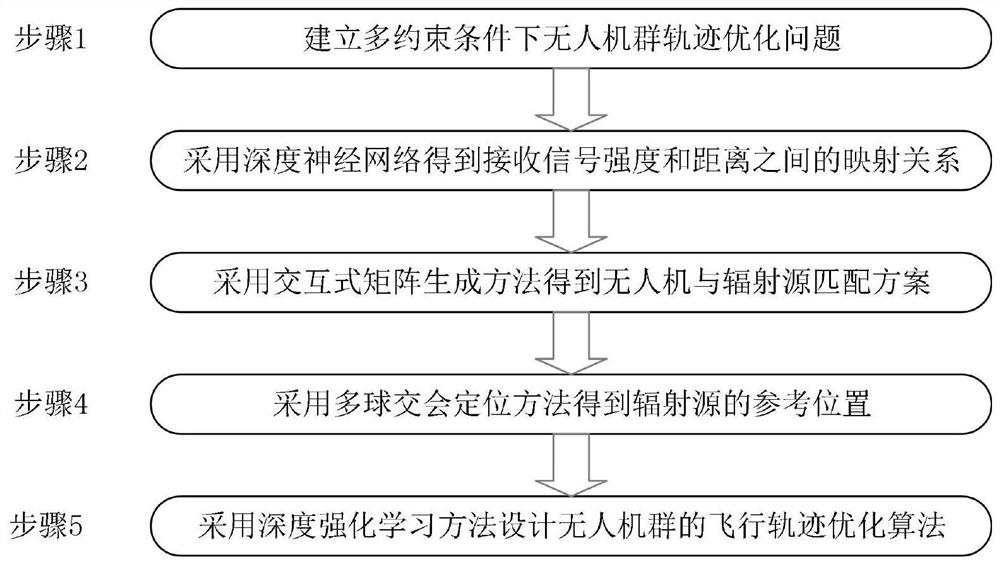
[0059] A UAV swarm flight trajectory optimization method for multi-radiation source tracking, including the following steps:
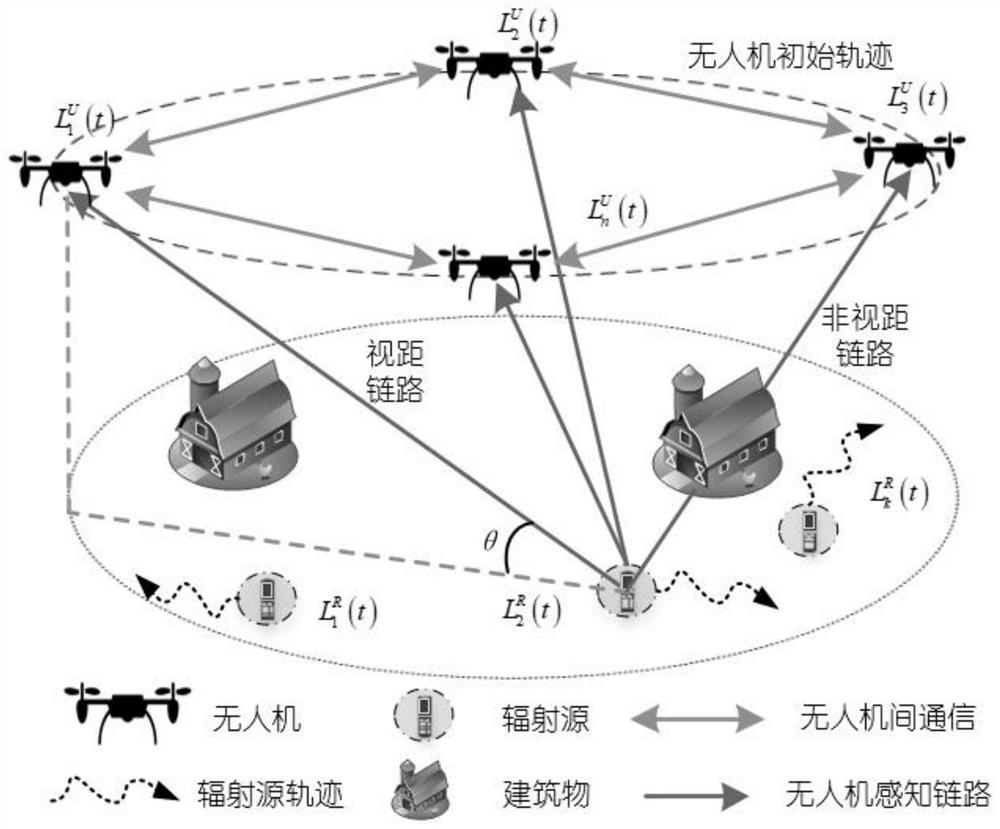
[0060] Step 1: Propose a UAV swarm trajectory optimization problem under multi-constraint conditions, and build a UAV swarm trajectory optimization model under multi-constraint conditions;
[0061] Step 2: Use a deep neural network to estimate the channel model to obtain the mapping relationship between received signal strength and distance;
[0062] Step 3: Use the interactive method to generate the received signal strength matrix, calculate the corresponding distance matrix and obtain the matching scheme between the UAV and the radiation source;
[0063] Step 4: Using the multi-sphere intersection positioning method, combined with the mapping relationship between received signal strength and distance, calculate the reference ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More