

Passive flexible knee-ankle joint power-assisted exoskeleton robot
An exoskeleton robot, passive technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as more consumption, wearer discomfort, gait interference, etc., to reduce extra mass, improve power-assisted efficiency, and reduce metabolism Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0081] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, and are not intended to limit the present invention.
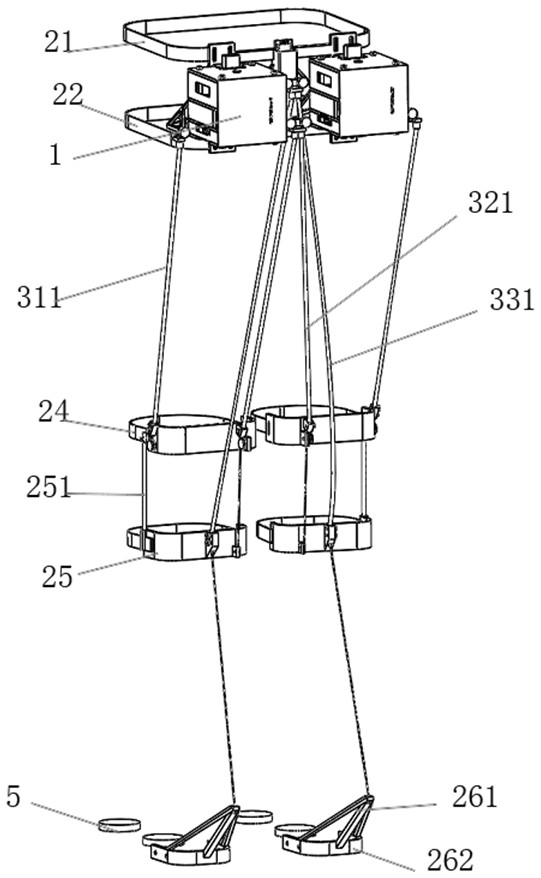
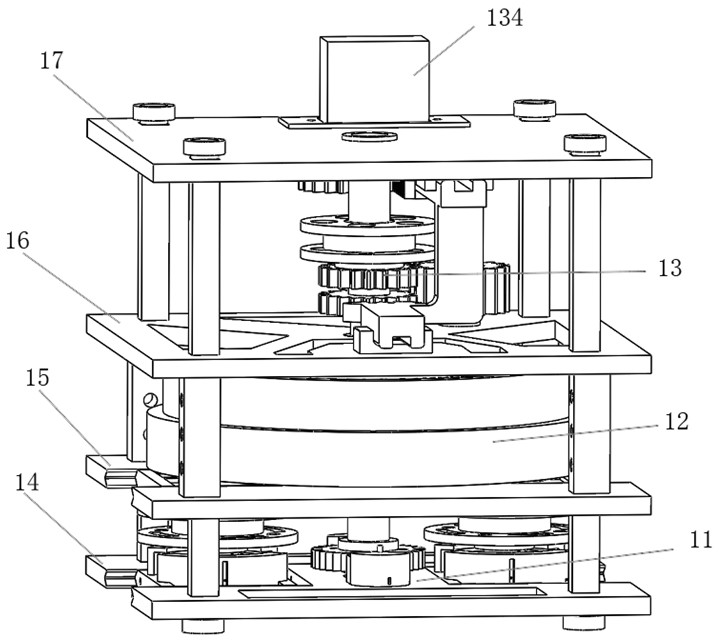
[0082] See figure 1 , figure 2 , Figure 17 with Figure 18 , a passive flexible knee-ankle-assisted exoskeleton robot, including an exoskeleton bracket and a pair of energy recovery and release devices 1;
[0083] The exoskeleton support includes an annular upper waist strap 21, a lower waist strap 22 and a pair of leg supports;
[0084] The upper waist strap 21 and the lower waist strap 22 are arranged horizontally and fixedly connected by a vertical back frame 23, and a pair of energy recovery release devices 1 are installed side by side on the back frame 23 through a pair ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More