

Motion track planning method for mechanical arm servo tumbling satellite butt joint circular ring
A technology of motion trajectory and manipulator, which is applied in the direction of manipulator, program control manipulator, manufacturing tools, etc., can solve the problems of inability to complete the servo manipulator work space within the specified time, drift of the end track of the manipulator, and inability to lock, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0027] Specific implementation mode one: combine Figure 1-2 In this embodiment, a method for planning a motion trajectory of a robotic arm servo tumbling satellite docking ring, the specific process is as follows:
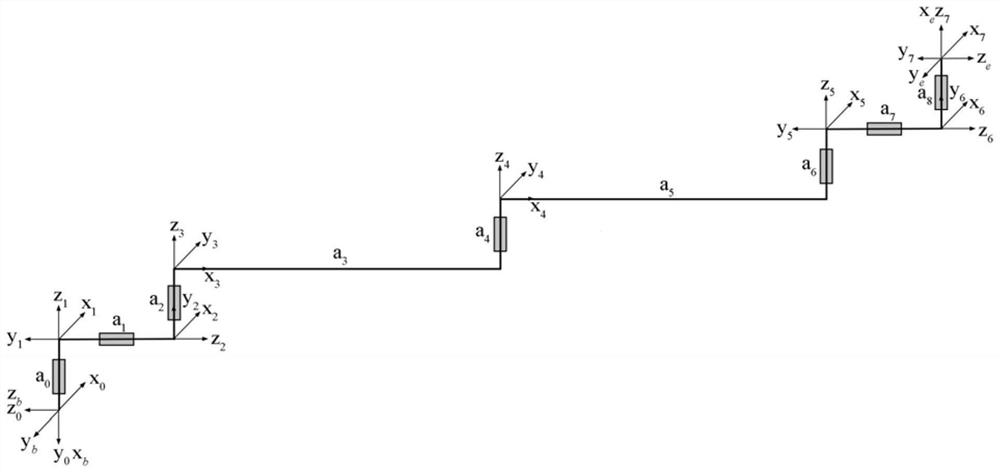
[0028] Step 1. Obtain the pose matrix of the base system of the manipulator relative to the end tool system according to the joint angle information fed back by the joint position sensor of the manipulator in real time e T b ; The joint coordinate system of the manipulator is as follows figure 1 As shown, the corresponding DH parameter table is shown in Table 1;
[0029]
[0030] Among them, θ is the vector of 7 joint angles, l is the length parameter of the connecting rod of the manipulator, which is the connecting rod offset distance d i the value of b T 0 is a constant matrix, e T b Indicates the pose matrix from the base system of the manipulator to the end tool system, e is the end tool system, b is the base system of the manipulator, e no b , ...
Embodiment
[0097] For the effectiveness of the present invention, the following combination image 3 To Fig. 6, the technical solution of the present invention is further described, using computer simulation.
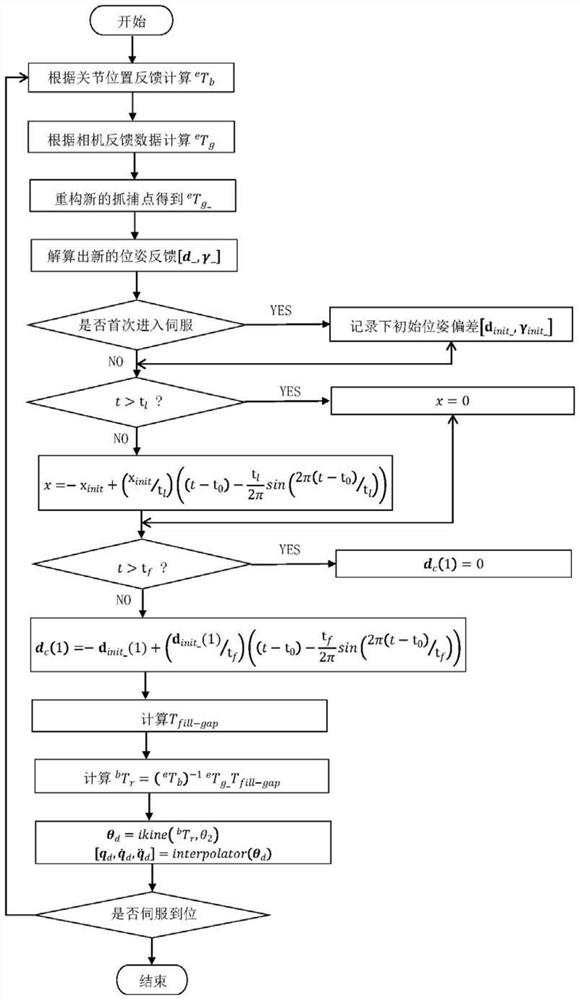
[0098] Build a computer simulation platform, start the servo, the specific implementation steps are as attached image 3 As shown, the following operations are performed in each planning cycle:
[0099] [Step S1] Calculation based on joint angle feedback e T b ;
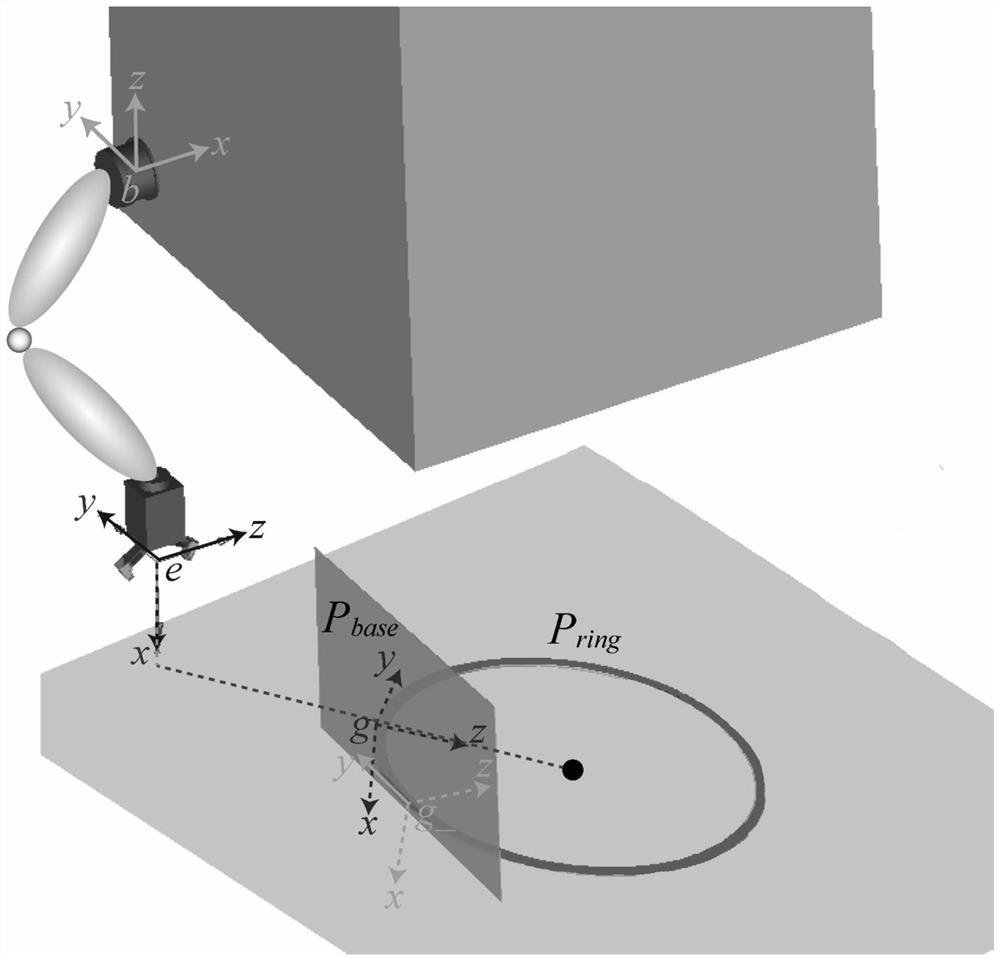
[0100] [Step S2] Calculation based on joint angle feedback e T g ;
[0101] [Step S3] The radius of the target docking ring is 813.25mm, reconstruct the new capture point, and calculate e T g_ ;
[0102] [Step S4] From e T g_ Solve the new pose feedback [d_, γ_];
[0103] [Step S5] Judging whether to enter the servo for the first time, if it is the first time to enter the servo, record the initial pose deviation [d init_ , gamma init_ ], otherwise go directly to the next step;
[0104] [Step S6] Judging wh...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More