

Neural network mechanical arm dynamics modeling method based on genetic algorithm optimization
A dynamic modeling and genetic algorithm technology, applied in neural learning methods, biological neural network models, genetic laws, etc., can solve problems such as the inability to meet the real-time requirements of computing speed, and achieve the effect of accurate construction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
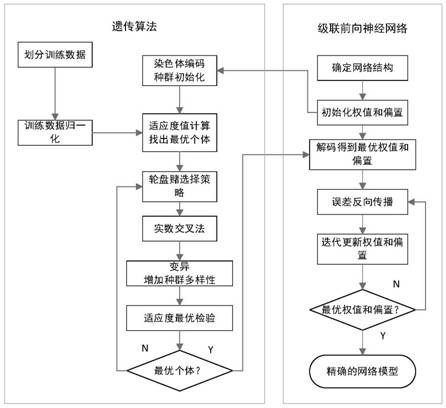
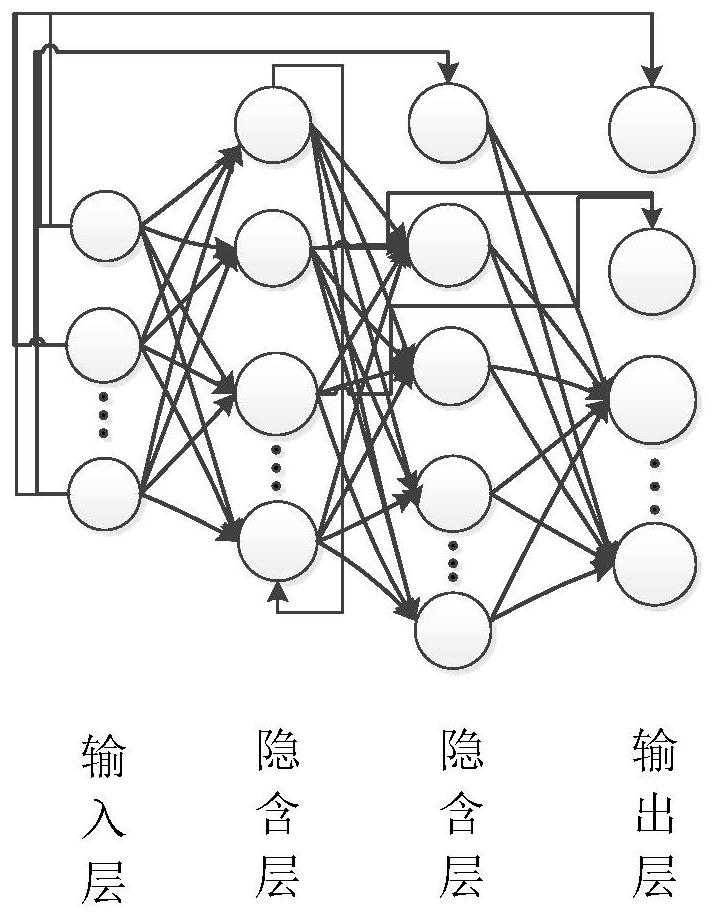
[0038] see Figure 1 to Figure 8 As shown, the present invention relates to a dynamic modeling method of a mechanical arm, the modeling method involves a joint motion variable of a mechanical arm and the relationship between the output torque, and the joint motion variables include joint angle, joint velocity and Joint acceleration, the modeling method adopts a cascaded forward neural network structure and a genetic algorithm structure to construct the dynamic model of the mechanical arm, and the described cascaded forward neural network structure includes a plurality of hidden layers, each layer All are connected to its input layer, and the layers are cascaded with each other. By continuously optimizing the parameters in the input-output relationship, the final output deviation converges to the minimum value, and the nonlinear approximation capability is realized;
[0039] The cascaded forward neural network structure includes a plurality of parameters and a training method, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More