

Seabed land amphibious robot
A robot and mobile technology, applied in amphibious vehicles, motor vehicles, transportation and packaging, etc., can solve the problem of underwater robots being unable to travel, and achieve the goal of ensuring the ability of amphibious transfer operations, reducing overall development costs, and enhancing adaptability. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] The present invention is further described below in conjunction with the accompanying drawings.
[0016] The present invention designs a submarine land amphibious robot to achieve the function of the robot amphibious, generalization of parts, to overcome the shore and seabed of various extreme geomorphological environments, and can be transferred between the two places, improve work efficiency, reduce risk, to achieve sustainable development.
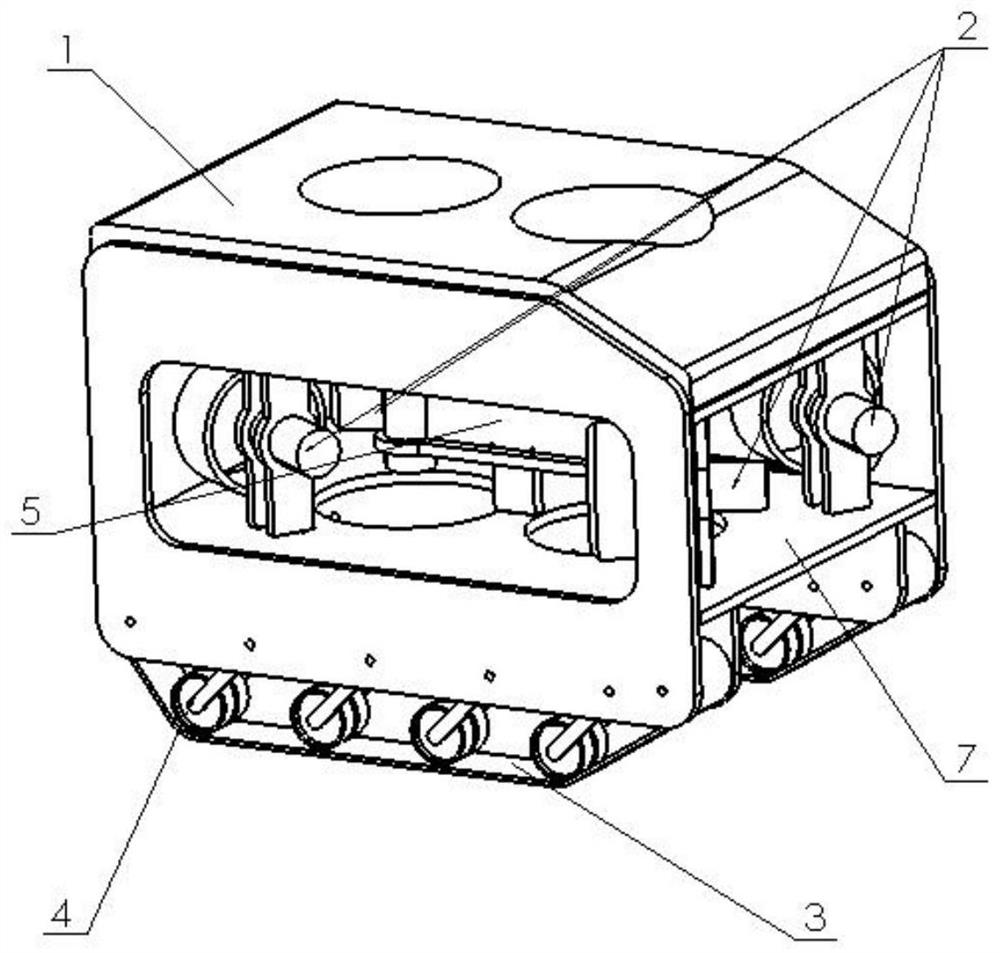
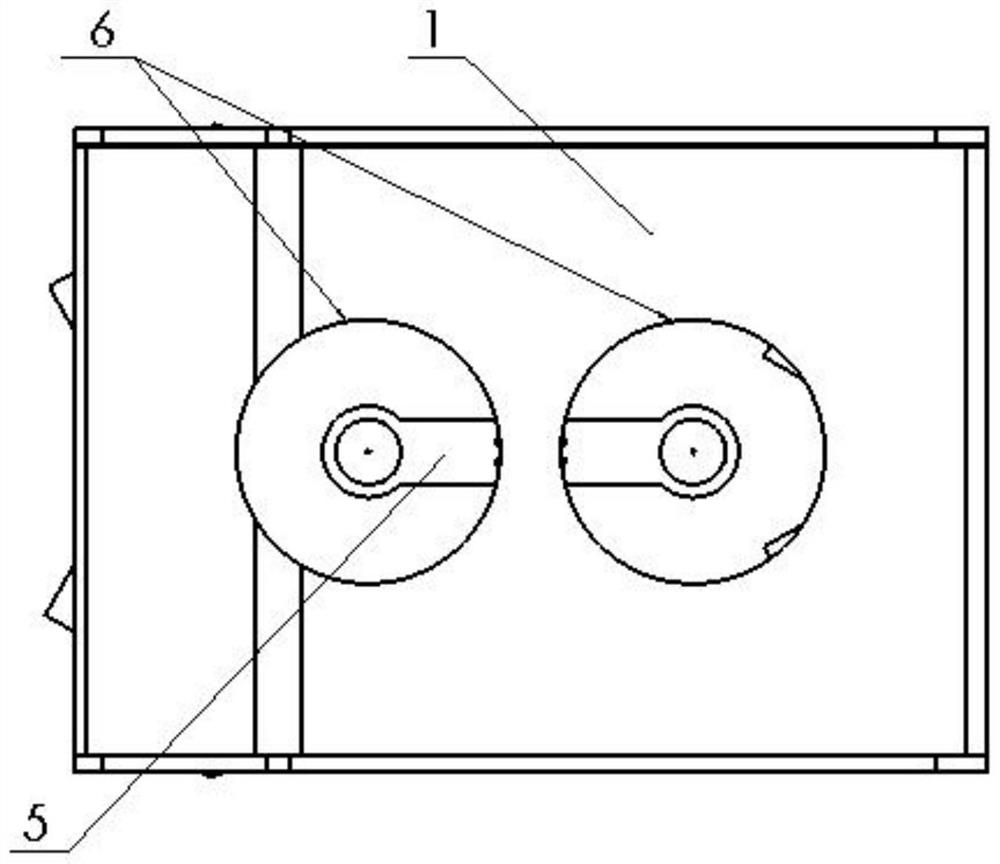
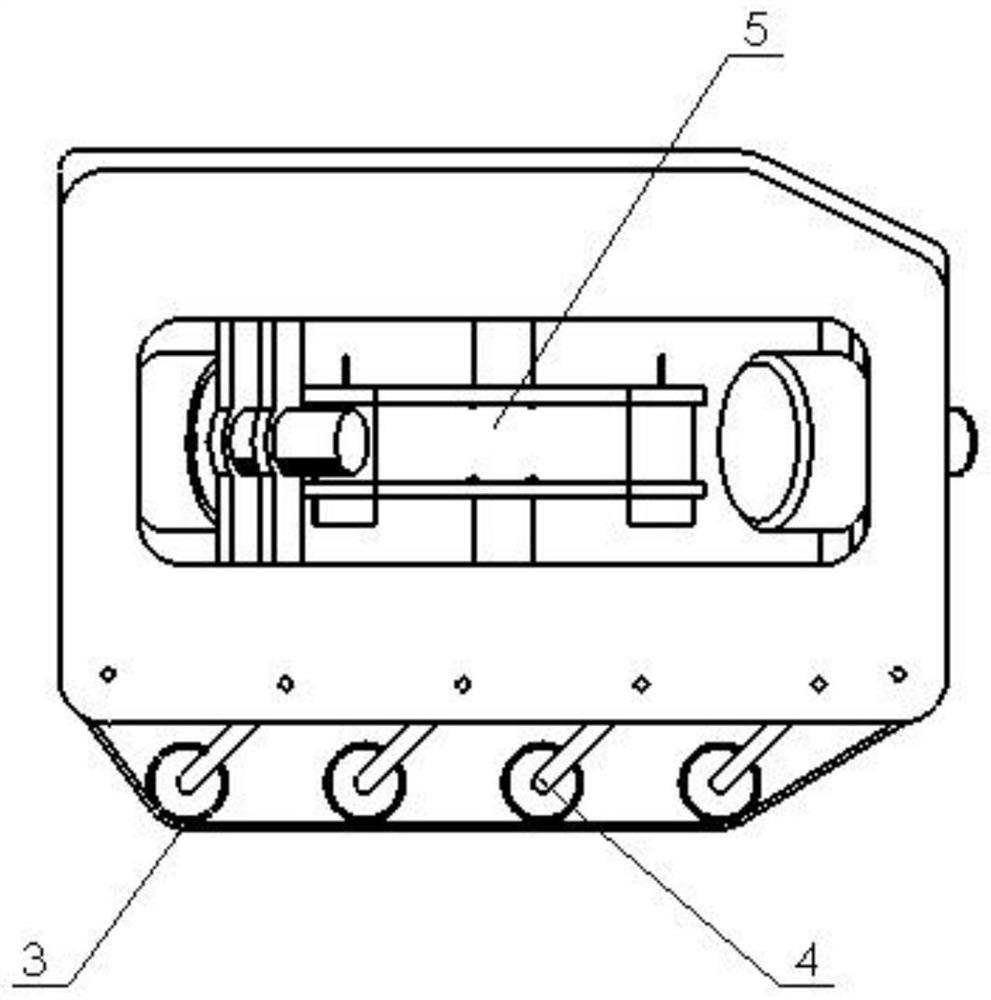
[0017] reference Figure 1-Figure 4 , the present invention provides a submarine land amphibious robot, comprising a general frame, a horizontal duct propeller thruster 2, a vertical duct propeller thruster 5, a bottom platform 7, a shock absorption system and a track 5.
[0018] The overall framework acts as the skeleton and supporting component of the submarine land amphibious robot. Horizontal culvert propeller thruster 2 is four, set in an X-shape around the overall frame, and the four horizontal culvert propeller thruster 2 is re...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More