

Under-actuated buoyancy adjusting device and adjusting method thereof
A buoyancy adjustment and underactuated technology is applied in the field of auxiliary devices of underwater robots, which can solve the problems of increasing the self-weight of underwater robots, complex structure, limited adjustment ability, etc., and achieves improved energy utilization, high motion stability, and easy elongation. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
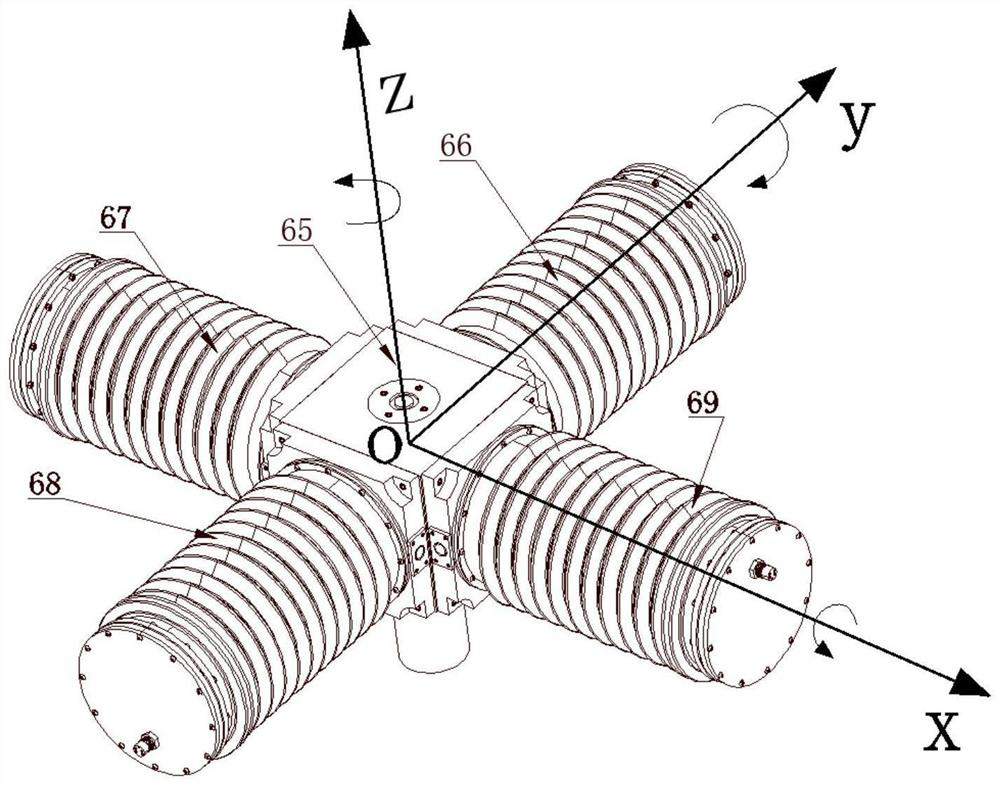
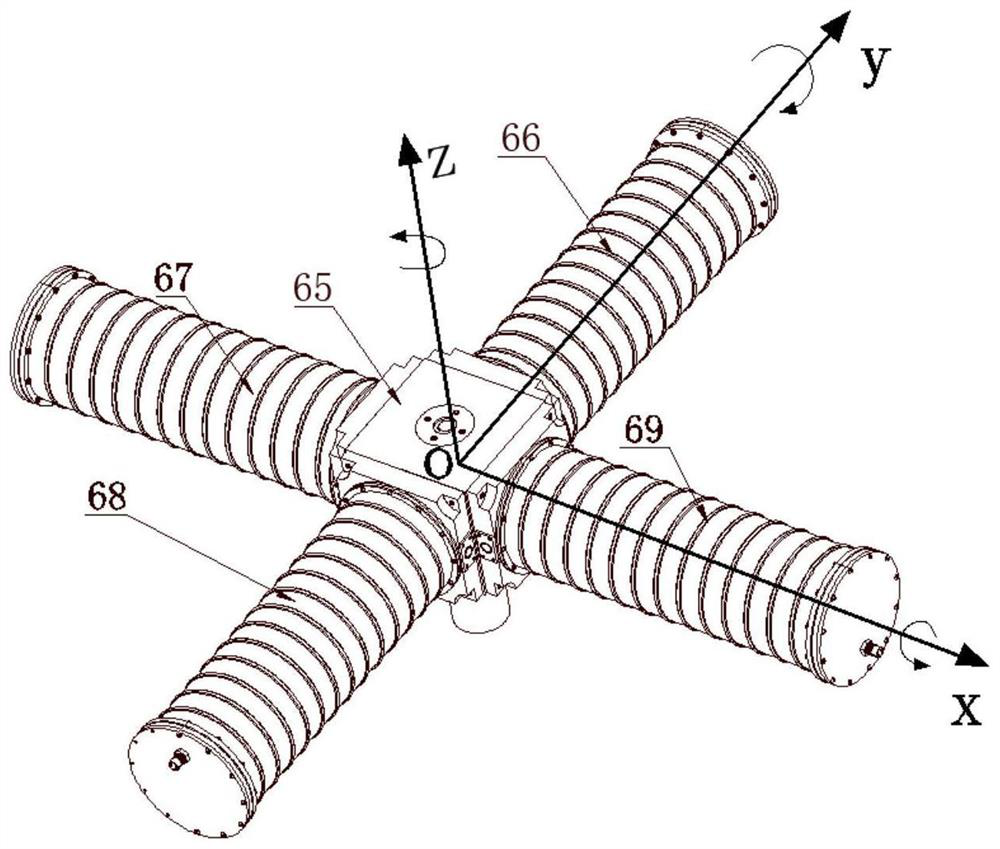
[0054] like figure 1 , figure 2 , Figure 30 (a), Figure 30 (b), Figure 30 As shown in (c), an underactuated buoyancy adjustment device in this embodiment includes a power module 65 and at least two adjustment modules. The adjustment modules are evenly distributed around the power module 65. In this embodiment, the four adjustment modules are example to illustrate.
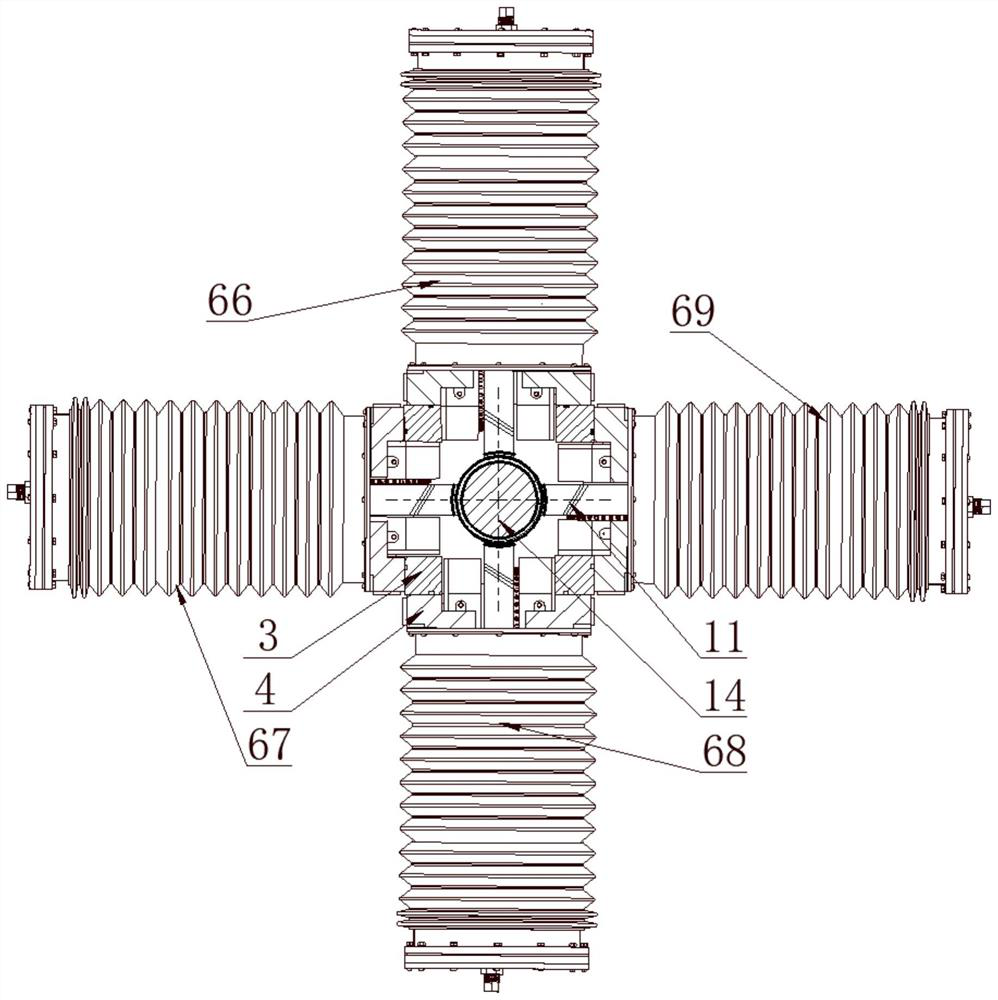
[0055] like figure 1 and figure 2 As shown, in this embodiment, an underactuated buoyancy adjustment device with four adjustment modules is used, including a power module 65 , a first adjustment module 66 , a second adjustment module 67 , a third adjustment module 68 , and a fourth adjustment module 69 . The first adjustment module 66 , the second adjustment module 67 , the third adjustment module 68 , and the fourth adjustment module 69 have the same structure. The power module 65 is located at the center position, the first adjustment module 66 , the second adjustment module 67 , the third adjustment ...
Embodiment 2
[0075] like Figure 30 As shown, an adjustment method for an underactuated buoyancy adjustment device in this embodiment is described by using four adjustment modules as an example, including the following steps:
[0076] Step 1: Collect attitude information of the underactuated buoyancy adjustment device;
[0077] Step 2: Establish the space coordinate system oxyz of the buoyancy adjustment device: take the geometric center of the power module 65 as the coordinate origin O, take the axis of the worm 14 as the z-axis, take the central axis of the fourth adjustment module 69 as the x-axis, take the first adjustment module The central axis of 66 is the y-axis;
[0078] Step 3: Set the target attitude information of the underactuated buoyancy adjustment device to obtain the target buoyancy F required for adjustment z , floating moment M;
[0079] Step 4: Decompose the target buoyancy F and the buoyancy moment M to the coordinate axis, obtain the component force and component f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More