

Multi-vehicle cooperative control method and device for guaranteeing rapid formation and stability of vehicles
A collaborative control and vehicle technology, applied in the field of multi-vehicle platoon control, can solve the problems of redundancy, low accuracy of the control system, and the accuracy of a single control method, so as to reduce system errors, have a high degree of fitting, and achieve accurate control systems. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0069] The present invention is specifically described below in conjunction with accompanying drawing:
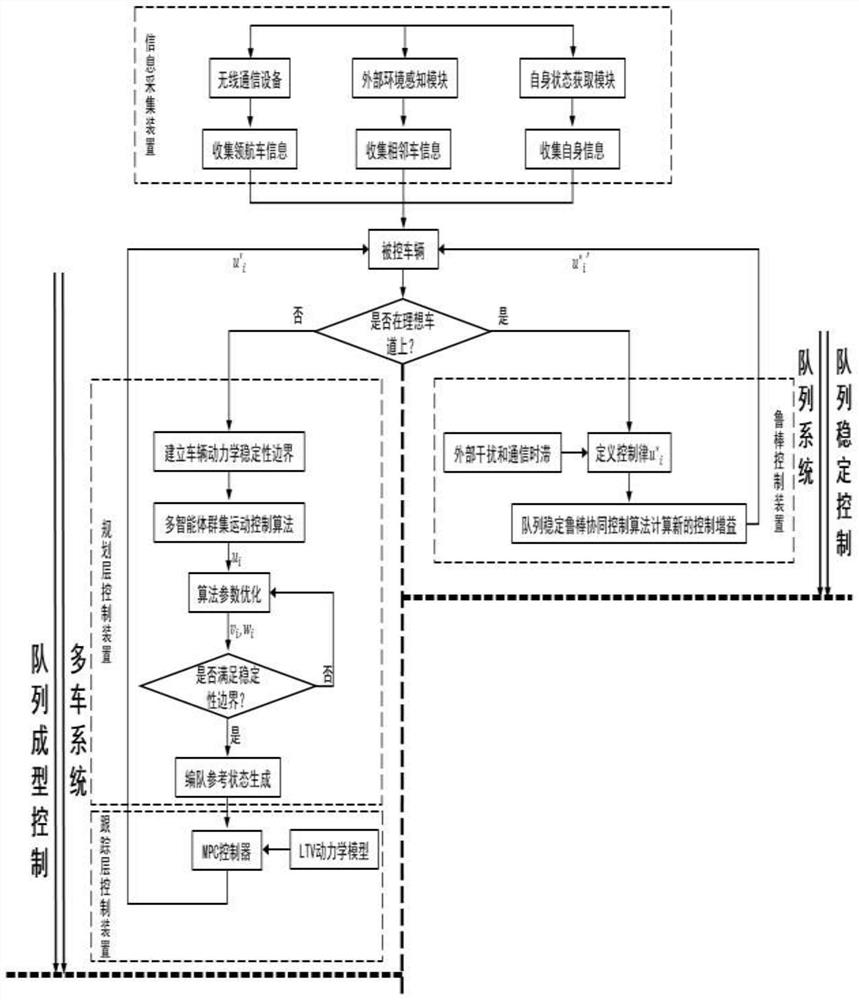
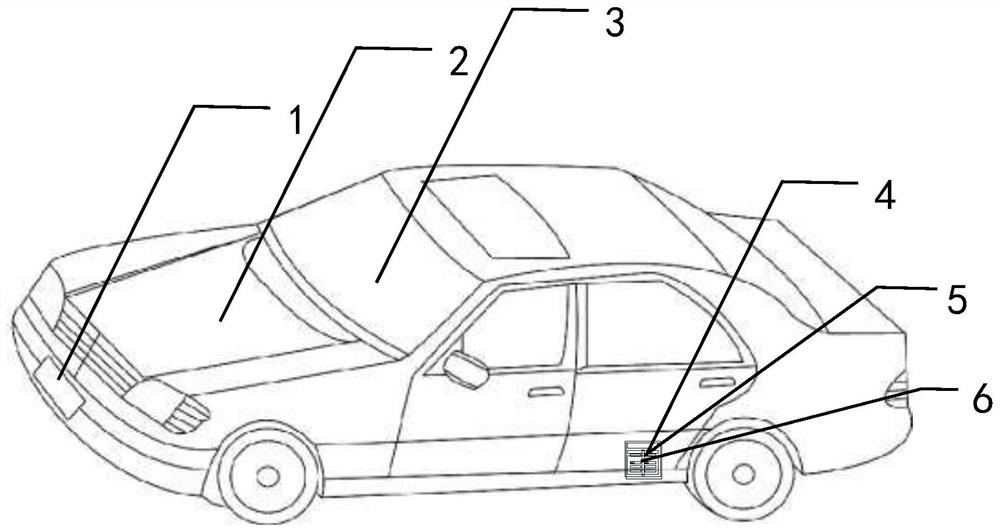
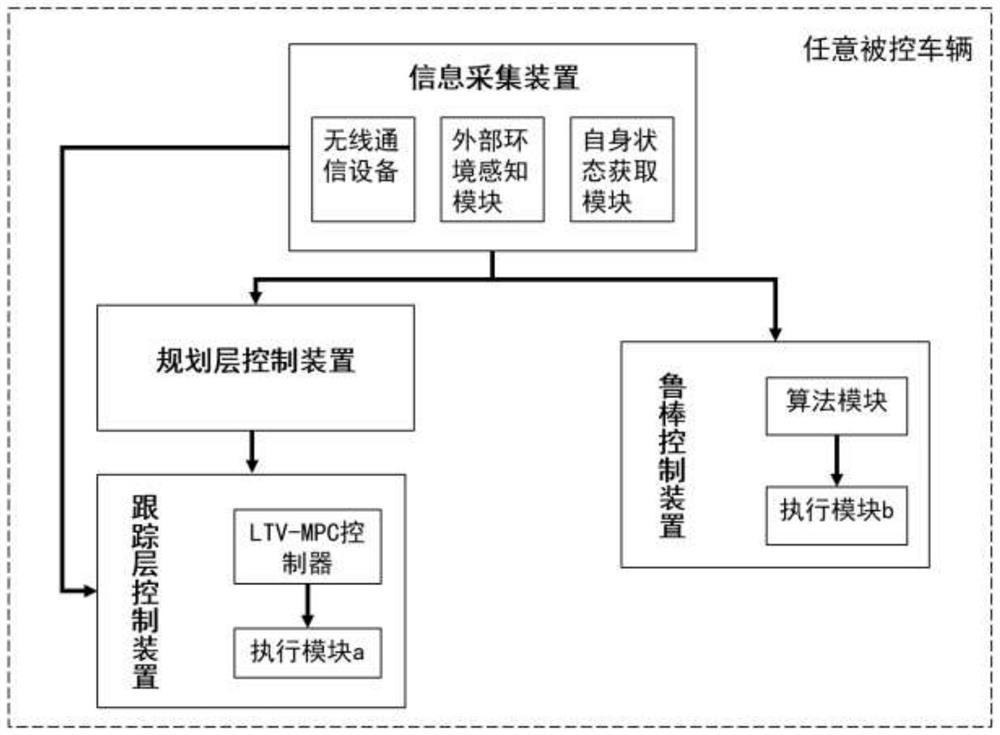
[0070] figure 1 It is a general block diagram of a multi-vehicle cooperative control method and device for ensuring rapid formation and stability of vehicles. The system used in the multi-vehicle cooperative control method provided by the embodiment of the present invention includes any controlled vehicle driving on the lane. Each vehicle is an intelligent connected car, and its state is fully observable and fully controllable. and, if figure 2 As shown, each vehicle is equipped with an information collection device, a planning layer control device 4, a tracking layer control device 5 and a robust control device 6, and the connection mode of the devices is figure 1 total block diagram and image 3 It has already been reflected in and will be explained in detail in the following steps.
[0071] The process of ensuring rapid and stable formation of vehicles will be des...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More