

Absolute positioning method based on fusion of visual inertial odometer and intermittent RTK (Real-Time Kinematic)
An absolute positioning and odometer technology, used in satellite radio beacon positioning systems, surveying and navigation, and navigation calculation tools, etc., can solve problems such as easy occlusion or relative positioning, large computational load, divergence, etc., to ensure safety. and stability, real-time robust absolute positioning, stable absolute positioning effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment
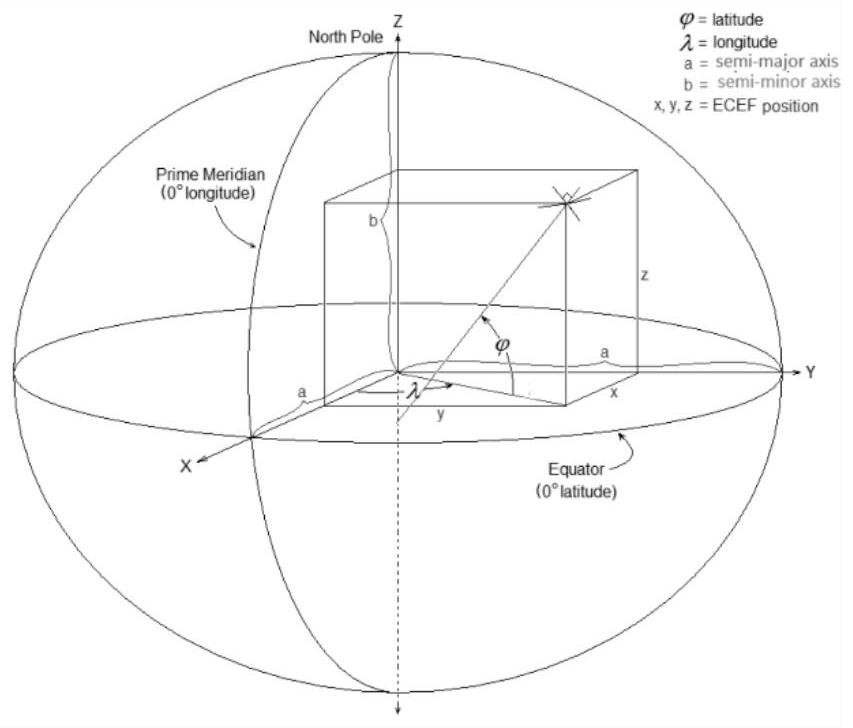
[0120] 1. RTK-VIO initialization. The positioning information obtained by RTK and the positioning information estimated by VIO are located in different reference coordinate systems. RTK uses the earth's geographic coordinate system as the reference system, which is represented by longitude, latitude and ellipsoid height respectively, while the VIO coordinate system is usually a local Cartesian The coordinate system takes the starting point as the coordinate origin, the Z axis of the coordinate system is perpendicular to the horizontal plane, and the position is represented by a three-dimensional vector and the attitude is represented by a quaternion. In order to integrate the two, it is first necessary to transform them into a unified reference system, and to achieve absolute positioning, the transformed coordinate system must be fixed at a certain point on the earth and remain unchanged in different operations. According to habit, select a point with a fixed latitude, longitu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More