Unmanned aerial vehicle aerial image and satellite image matching method
A satellite image and aerial image technology, applied in the field of image processing, can solve the problems of low matching accuracy, large differences in image scale and features, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0024] Embodiment 1: The specific process of a method for matching an aerial photographic image of an unmanned aerial vehicle with a satellite image in this embodiment is as follows:
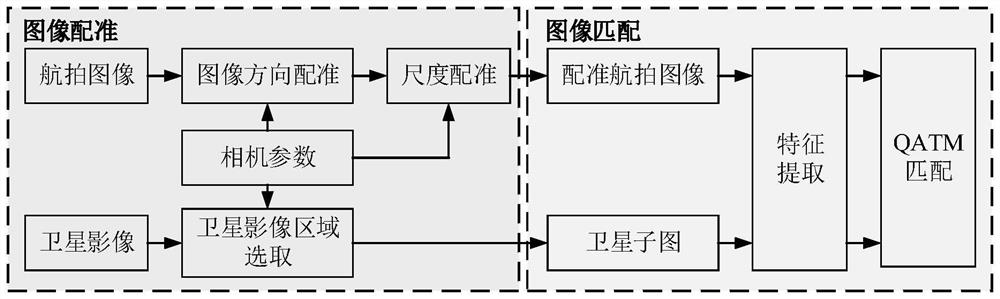
[0025] The present invention mainly studies a method for realizing the matching between the aerial photography image of the UAV and the satellite image. Because UAV aerial images are usually high-precision, small-scale images with a small coverage area taken at low flight altitudes, while satellite images are scanned and imaged by satellites, which are large-scale images with wide coverage. The existing image matching technology It cannot adapt to the matching between images with too large scale differences, so the present invention proposes a method to realize image registration by using camera imaging pose parameters according to the characteristics between UAV aerial photography images and satellite images, and then through QATM ( Quality-Aware TemplateMatching For Deep Learning) matching alg...
specific Embodiment approach 2
[0036] Embodiment 2: The difference between this embodiment and Embodiment 1 is that in the step 1, the satellite image and the UAV aerial image are obtained, and the direction registration is performed on the UAV aerial image based on the satellite image; the specific process is:
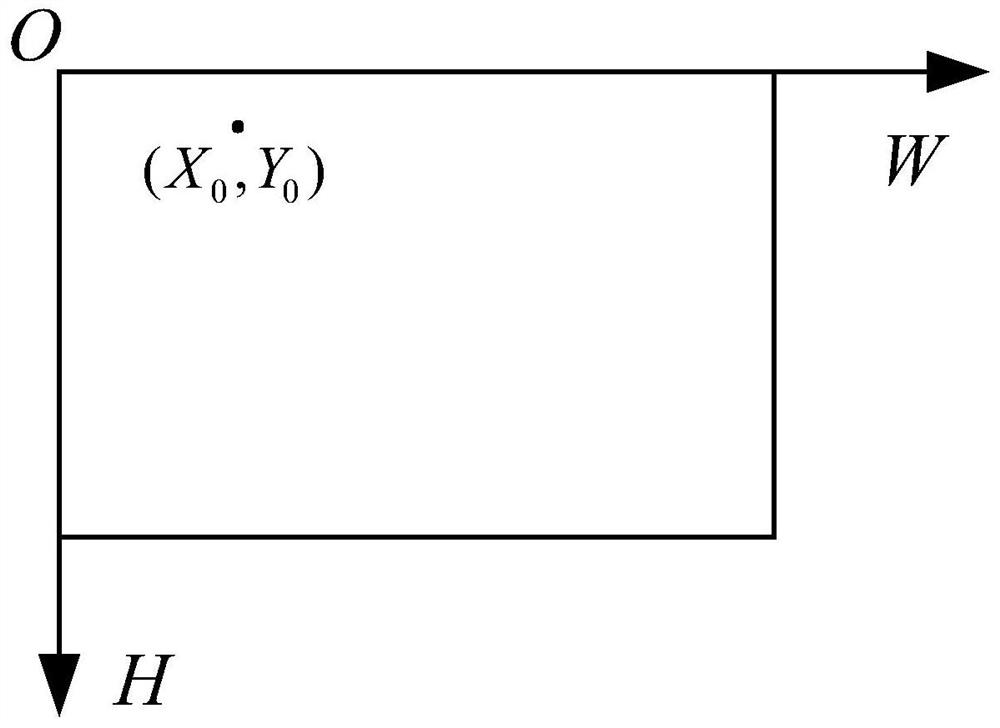
[0037] Take the upper left corner of the image as the origin O to establish the pixel coordinate system HOW, H is the ordinate of the pixel coordinate system, which is the height of the image; W is the abscissa of the pixel coordinate system, which is the width of the image;
[0038] A point in the image pixel coordinate system (X 0 ,Y 0 ) coordinates (X′ after rotating θ degrees clockwise around the center of the image 0 ,Y′ 0 ) is calculated by:
[0039]
[0040] The theoretical basis for formula (1) is as follows:
[0041] In the present invention, the direction registration of the image is realized by rotating the image. The essence of the image rotation is the rotation change of the coo...
specific Embodiment approach 3
[0055] Embodiment 3: The difference between this embodiment and Embodiment 1 or 2 is that in the step 2, scale space registration is performed on the UAV aerial image and satellite image after direction registration, and after scale space registration is obtained The UAV aerial imagery; the specific process is:
[0056] In the present invention, the registration of the UAV aerial image and the satellite image scale space is realized by calculating the scale relationship between the aerial image and the satellite image, and then resampling the aerial image to adjust the image pixel size according to the scale relationship.
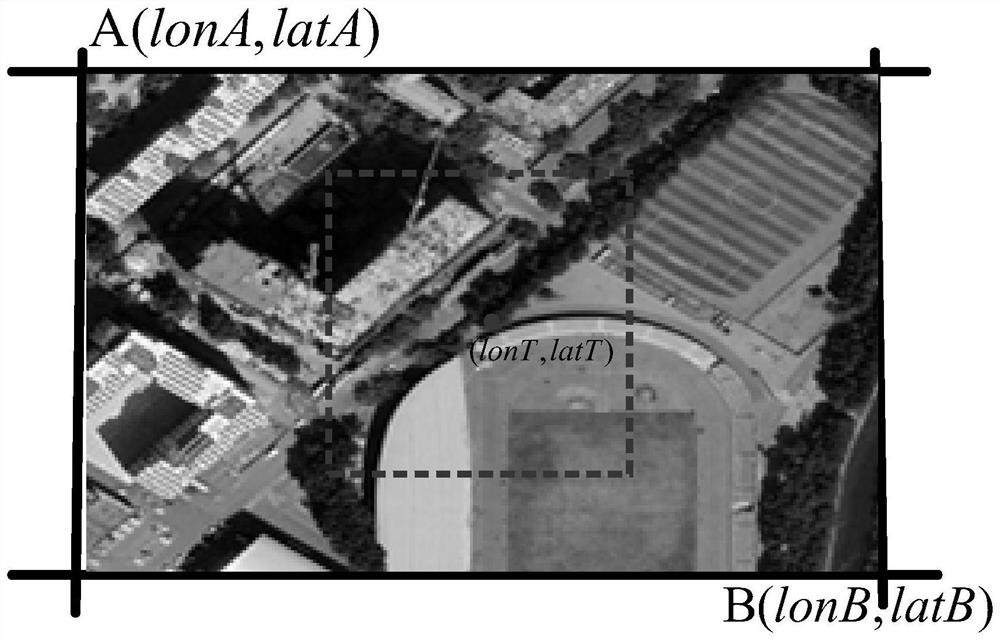
[0057] Assume that the length of the currently selected satellite image ground coverage area is L aX , the width is L aY , the satellite image size is H a ×W a , H a is the number of pixels in the satellite image image line, W a is the number of pixels in the satellite image image column;
[0058] Correspondingly, the size of the UAV aerial image is h...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More