

Multimodal fusion manipulator and design method for electric vertical take-off and landing tilt-wing aircraft
A technology of vertical take-off and landing, design method, applied in vertical take-off and landing aircraft, aircraft, rotorcraft and other directions, can solve the problem of insufficient adaptation of mission characteristics
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0067] Examples of control command parameters for electric vertical take-off and landing aircraft are shown in Table 1
[0068] Table 1 Example of control command parameters for electric vertical take-off and landing tilt-wing aircraft
[0069]
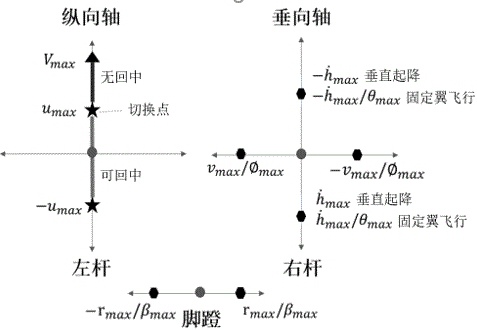
[0070] In the embodiment, the left joystick travels -10~0~10~50 (m / s) in the forward channel, and the switching point is set at 10m / s, so that -10~0~10 (m / s) vertical take-off and landing mode, the joystick can be returned to the center; 10~50(m / s) in level flight cruise mode, the joystick can not be returned to the center; the right joystick forward channel travel in the vertical take-off and landing mode -5~0~5(m / s) ;In level flight cruise mode travel -5~0~5(m / s) or -10~0~10(deg); Right joystick side channel travel -10~0~10(m / s) or -20 ~0~20(deg); Pedal stroke -10~0~10(s -1 ) or -4~0~4 (deg).
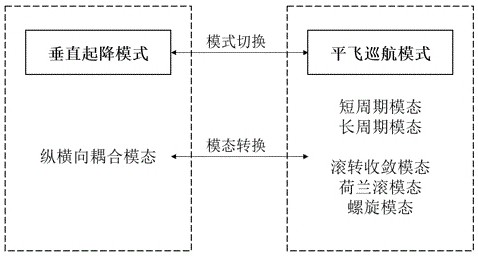
[0071] figure 2 It is a schematic diagram of the connection between the mode switching of the aircraft and the mode conversion of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More