

Large-scale scene mapping method based on real-time terrain-imitated flight method of unmanned aerial vehicle
A drone and large-scene technology, which is applied in the field of large-scene mapping, can solve the problems that drones cannot change terrain in real time, high-precision laser radar is heavy, and is fixed on the bottom of drones, etc., to achieve light weight, The effect of rich picture information and less number of flights
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] The content of the present invention is described in further detail below in conjunction with the accompanying drawings and specific embodiments:
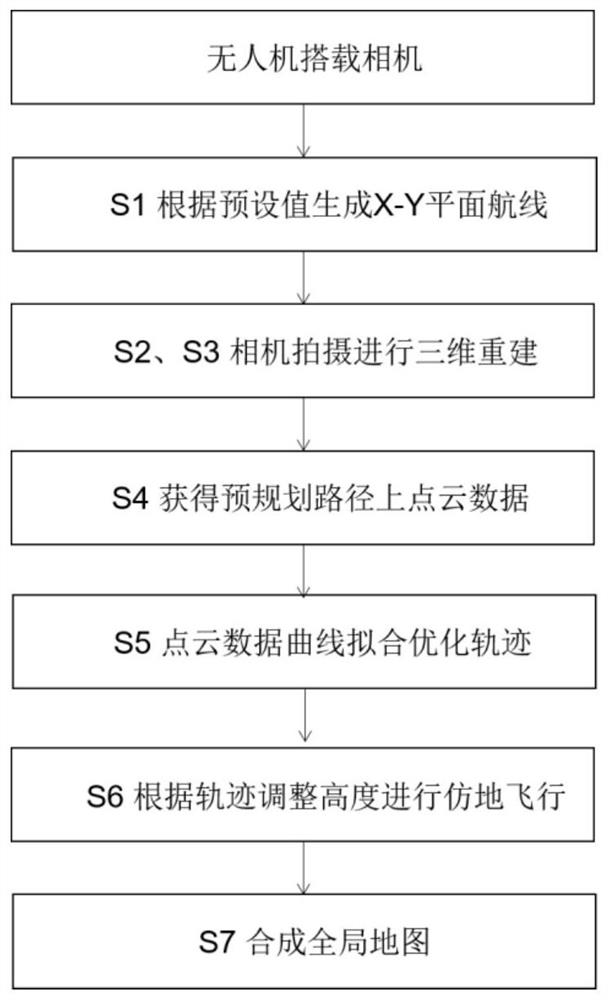
[0044] A large scene mapping method based on the real-time ground imitation flight method of UAV, the specific method is as follows:
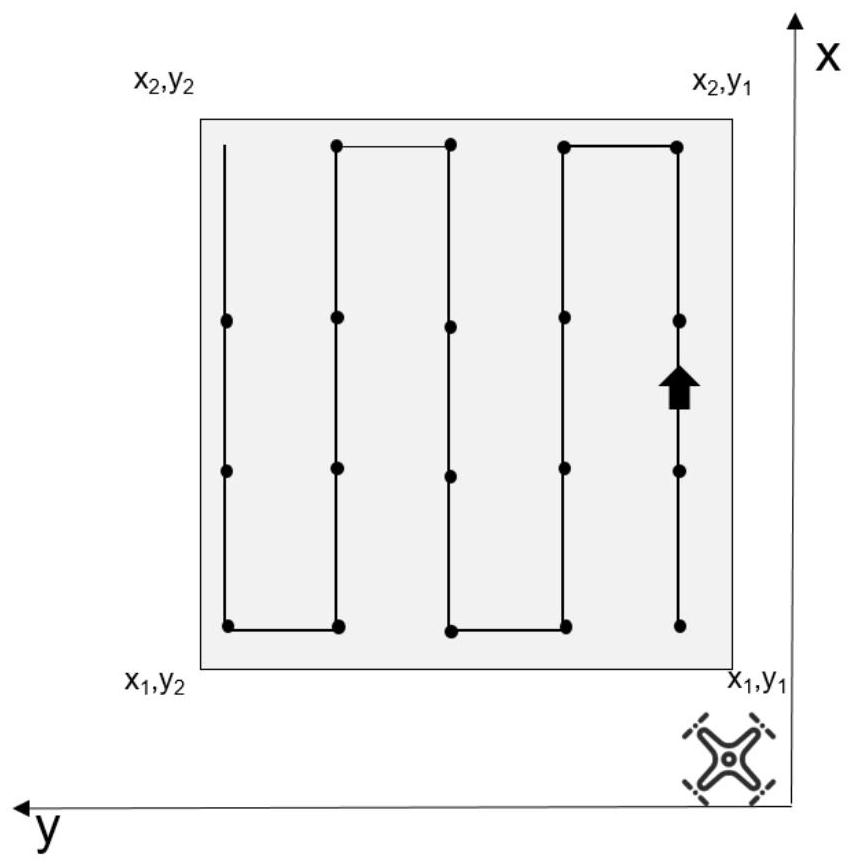
[0045] S1. Make X-Y route planning for the area of interest, take the direction of the nose as the X direction, the top of the drone as the Z direction, and the left side of the drone as the Y direction, and set the four vertices ( x1, y1), (x2, y1), (x2, y2), (x1, y2) are sent to the computing unit, and the nearest point is taken as the take-off point (x1, y1). like figure 2 As shown, the gray part is the region of interest.
[0046] According to the GSD and the overlap ratio required by the flight task, calculate the expected flying height of the UAV relative to the ground, the distance between adjacent shooting points in the X direction of the heading, and the distance between the rou...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More