Point cloud reconstruction method and system based on auto-encoder
An autoencoder and point cloud technology, applied in neural learning methods, instruments, 3D modeling, etc., can solve the problems of increased storage overhead, lack of generalization, and inability to process incremental point cloud data, etc. It has the effect of generalization, rich local details and fast reconstruction speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0050] The technical solutions in the embodiments of the present invention will be clearly and completely described below with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only a part of the embodiments of the present invention, but not all of the embodiments. Based on the embodiments of the present invention, all other embodiments obtained by those of ordinary skill in the art without creative efforts shall fall within the protection scope of the present invention.
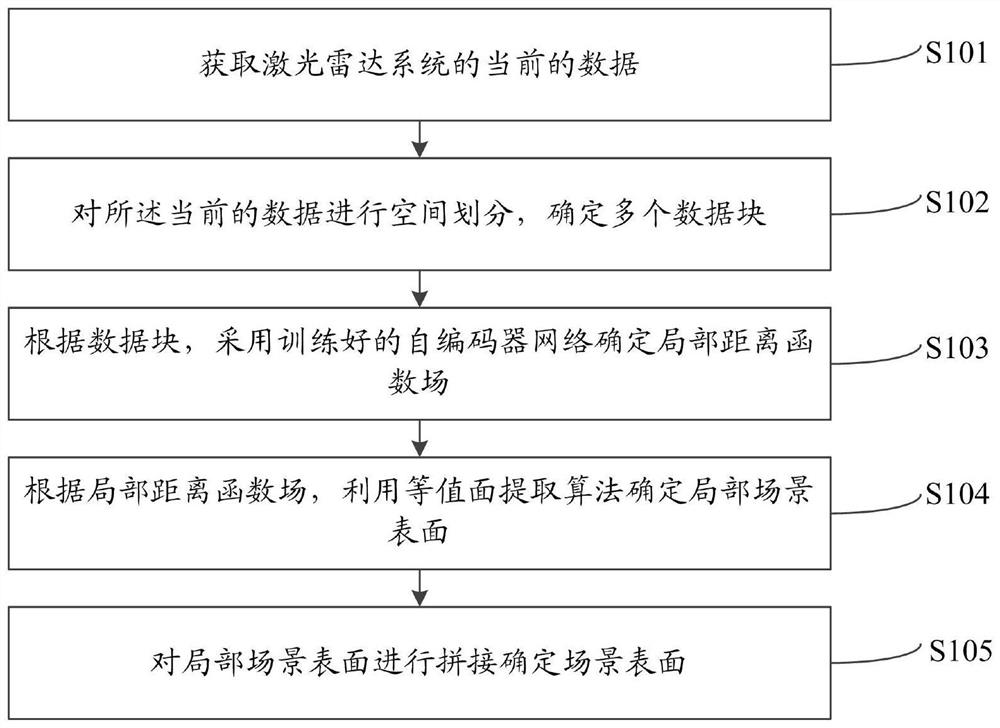
[0051]The purpose of the present invention is to provide a point cloud reconstruction method and system based on an autoencoder, which can incrementally reconstruct a high-quality complete scene from point clouds of several consecutive frames collected by a laser radar, and at the same time, the scene storage overhead is small, The reconstruction speed is fast and can cope with the reconstruction of most outdoor scenes.
[0052] In or...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More