

Permanent magnet synchronous motor force-position hybrid control system based on load torque estimation
A technology of permanent magnet synchronous motor and load torque, which is applied in the control system, vector control system, motor generator control, etc., can solve the problems of increasing application cost, inability to perform force control, increasing algorithm complexity and application cost, etc., to achieve Effects of low-cost, simple algorithms
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
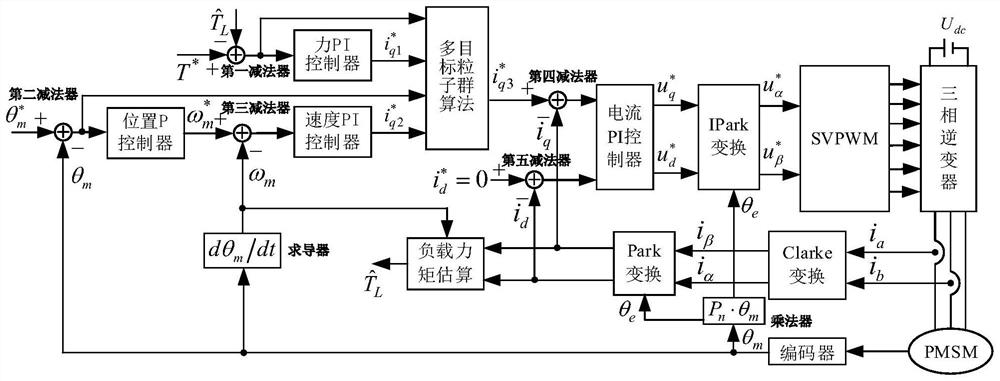
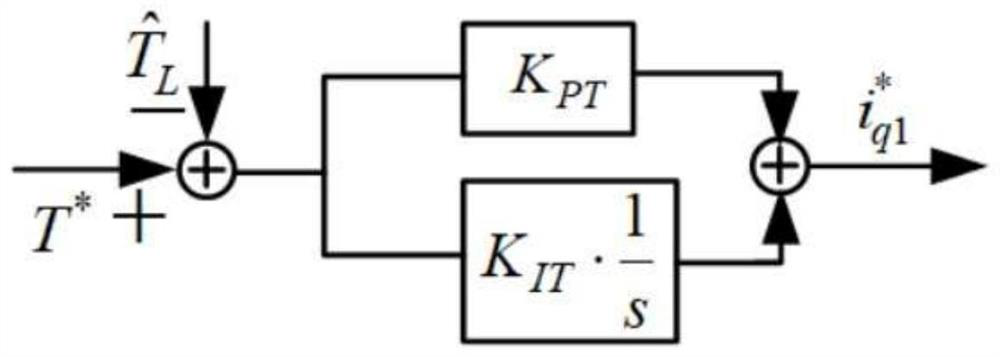
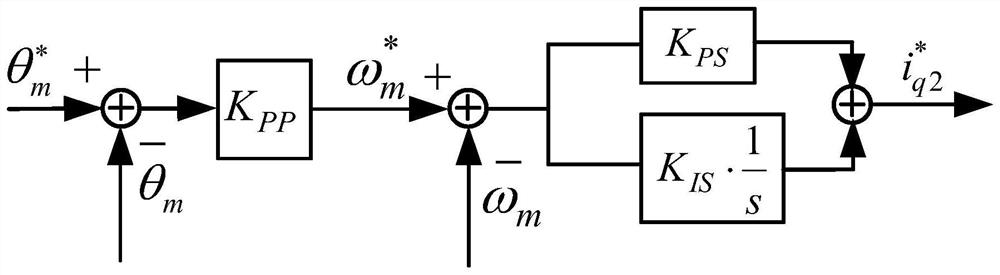
[0118] Force-position hybrid control system of permanent magnet synchronous motor based on load torque estimation, such as figure 1 shown, including force PI controller, position control current given calculation module (including position P controller and speed PI controller), multi-objective particle swarm algorithm module, current PI controller, IPark transformation module, space vector pulse width modulation Module (SVPWM) module, three-phase inverter, permanent magnet synchronous motor (PMSM), encoder, Clarke transformation module, Park transformation module, load torque estimation module, derivative, multiplier, and first to fifth subtractors ;
[0119] The two-phase current (i a and i b ) as the input of the Clarke transformation module, the actual position θ of the permanent magnet synchronous motor (PMSM) is obtained by using the encoder to collect m As the input of the derivative, the multiplier and the second subtractor respectively; the estimated load torque of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More