

Fruit detection positioning and orchard map construction method based on machine vision
A map construction and machine vision technology, applied in the fields of picking robots, smart agriculture, target detection, and visual SLAM, can solve problems such as not using individual semantic information of fruits, and achieve the effect of improving detection capabilities
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
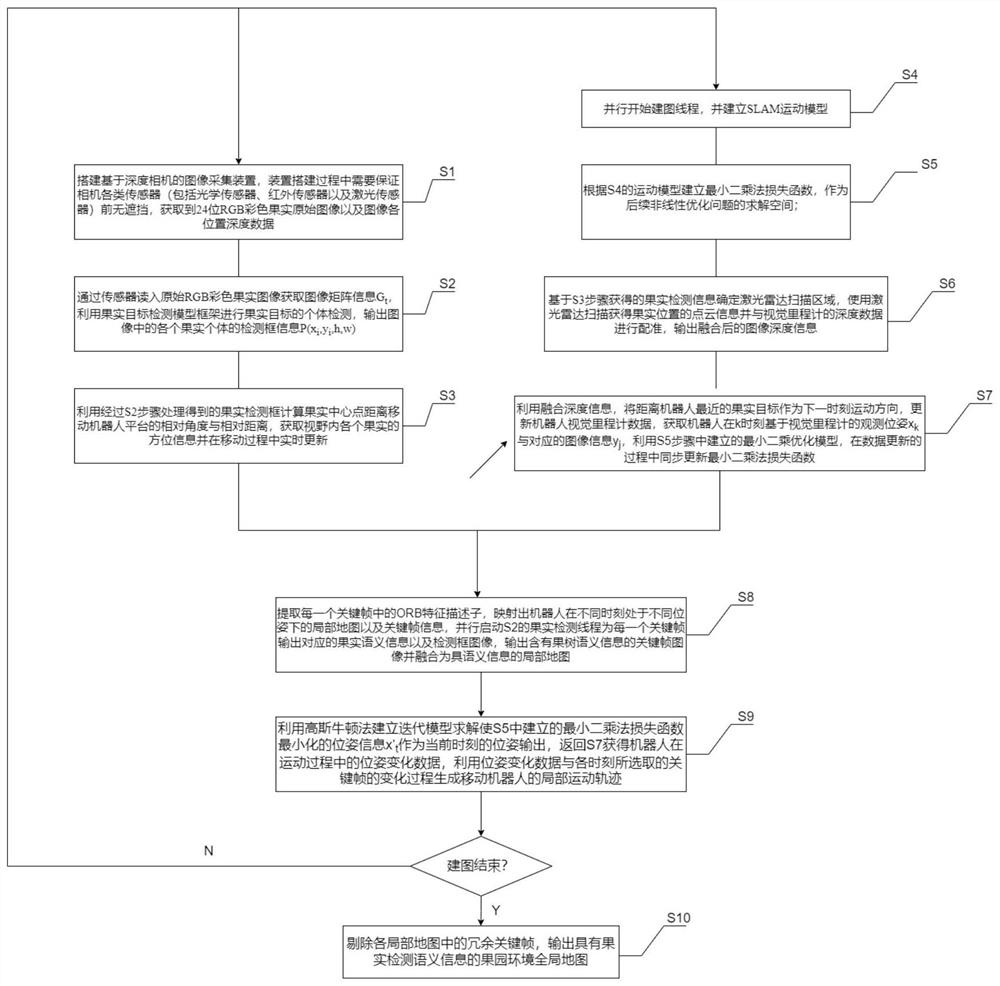
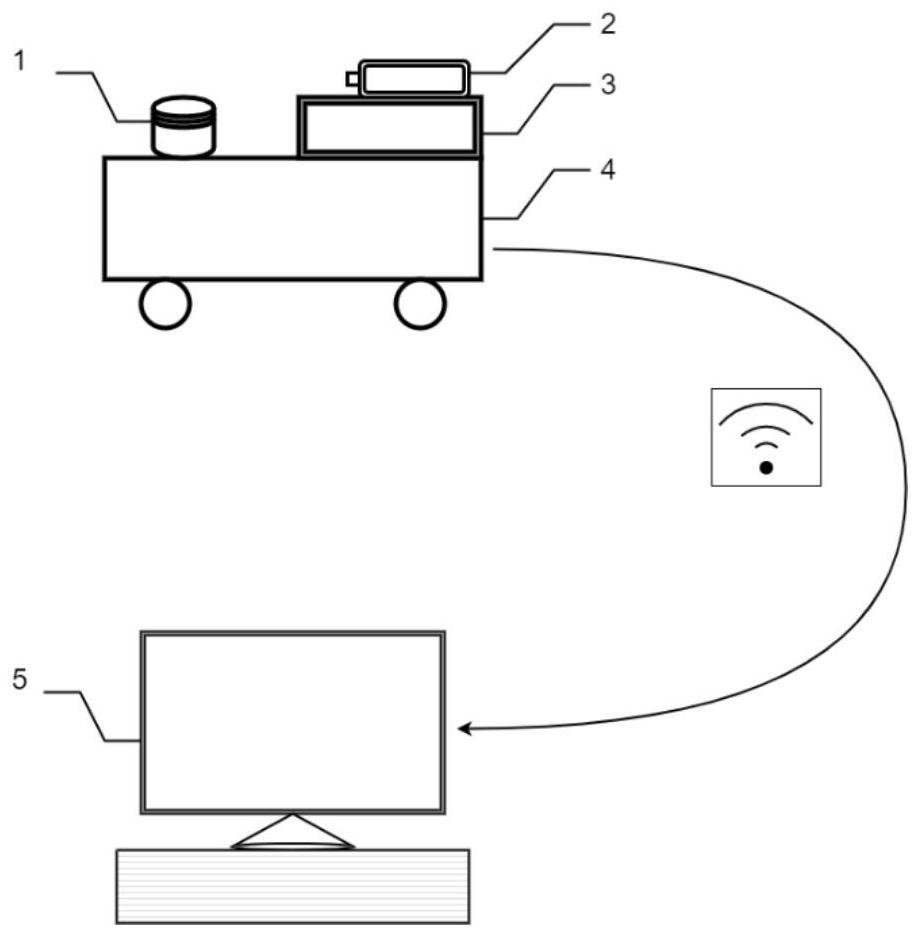
[0116] An example of the present invention discloses a method for fruit detection and positioning and orchard map construction based on machine vision, which can be applied to similar applications through software deployment. figure 2 used on the hardware device in the . figure 2 The example device shown includes a mobile robot platform 4, a lidar device 1, an image acquisition device 2, wherein the image acquisition device used in this example is an RGBD depth camera, a mobile robot host 3 with data storage and network connection and transmission functions, and a computer host 5 for receiving data transmitted by the mobile robot platform.
[0117] Further, in an example of the present invention, the mobile robot platform 4 moves in the orchard environment after receiving the work instruction, and collects the point cloud and image information in the surrounding environment through the laser radar and the image acquisition device during the moving process and sends it to th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More