

Fingertip three-dimensional contact force sensing device and fingertip three-dimensional contact force sensing method capable of reserving touch sense
A sensing device and contact force technology, applied in the field of human-computer interaction, can solve the problems of being easily affected by ambient light, unable to provide three-dimensional force feedback signals for rehabilitation training, and low estimation accuracy, so as to improve the rehabilitation effect and enhance fitness. Compatibility and compact structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The technical solutions of the present invention will be described in further detail below with reference to the accompanying drawings and embodiments. The following examples are intended to illustrate the present invention, but not to limit the scope of the present invention.
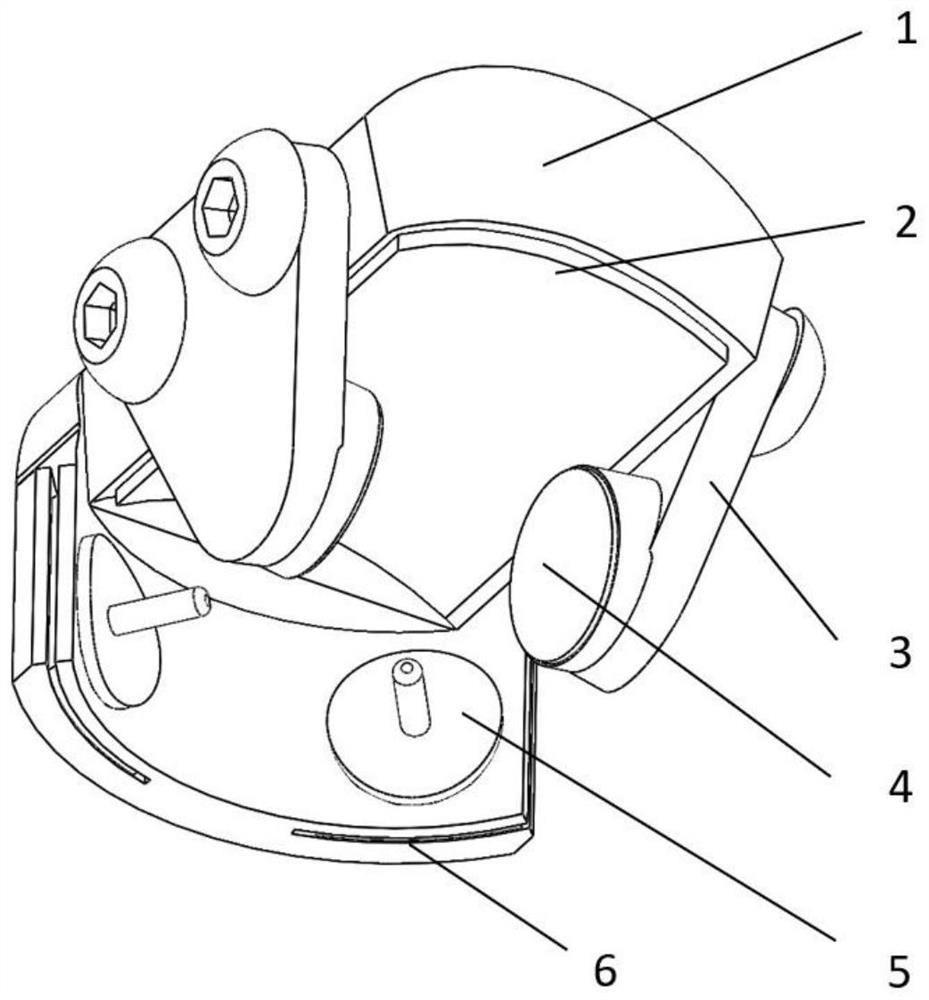
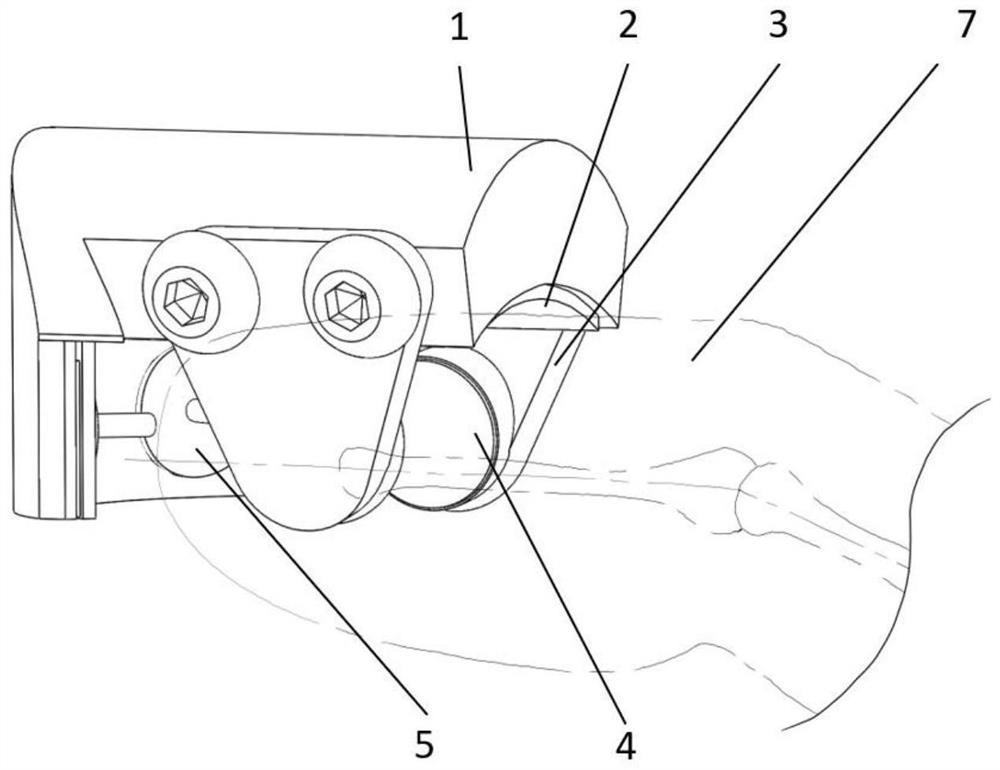
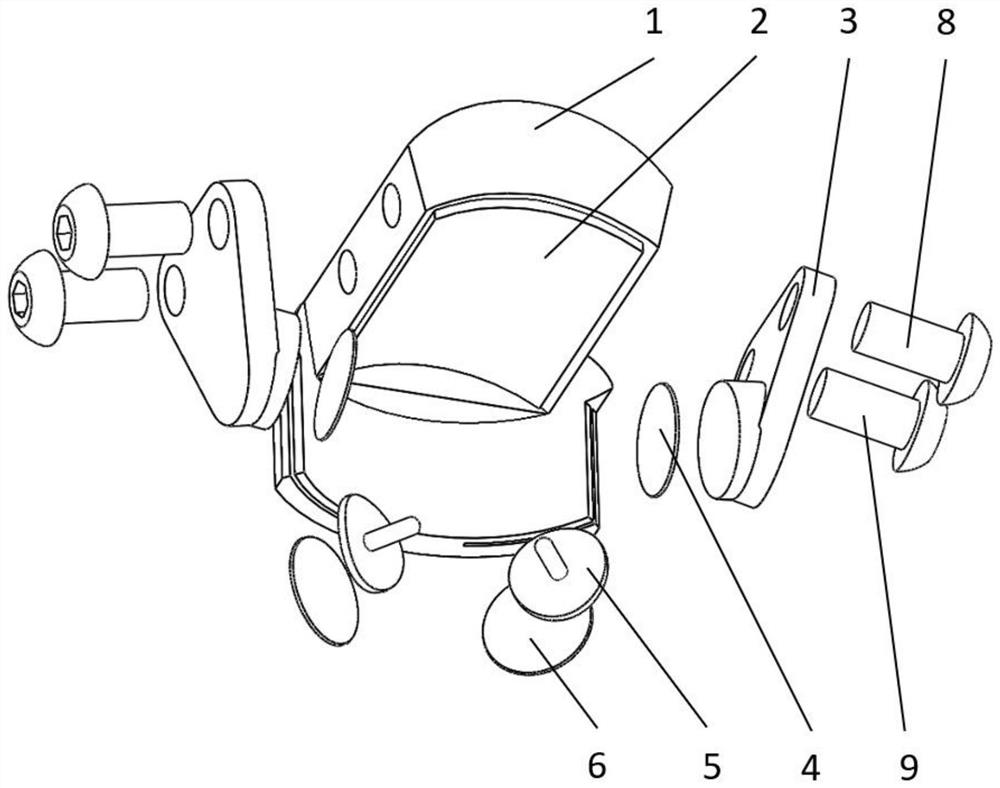
[0033] refer to Figure 1-Figure 2 , a tactile-retaining fingertip three-dimensional contact force sensing device, which is a symmetrical structure, including a base 1, an adaptive pad 2, a side plate 3, a radial film sensor 4, a contact head 5, and an axial film sensor 6;
[0034] An adaptation pad 2 is installed on the upper part of the inner cavity of the base 1, and the adaptation pad 2 is in contact with the upper surface of the human finger 7. The Revopoint handheld 3D scanner scans the human finger 7 to obtain the size and curved surface characteristics of the human finger 7, and the adaptation pad 2. Personalized design according to the size of human finger 7 and surface features;
[0...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More