

Helicopter system adaptive neural network control method based on specified performance constraint
A neural network control and neural network technology, which is applied in the field of adaptive neural network control of helicopter systems based on specified performance constraints, can solve problems such as actuator overrun and closed-loop system instability, achieve less sensors and control, and improve robustness. , the effect of precise tracking and control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
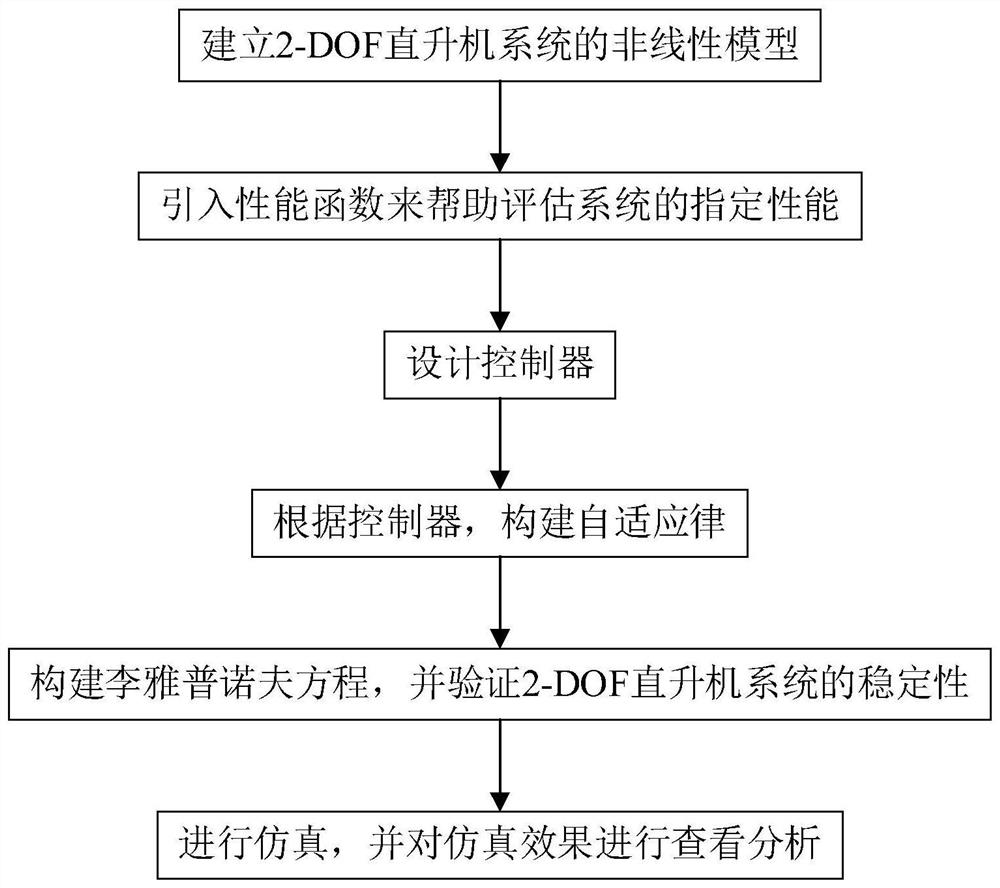
[0096] like figure 1 As shown, this embodiment provides an adaptive neural network control method for a helicopter system based on a specified performance constraint, which includes the following steps:
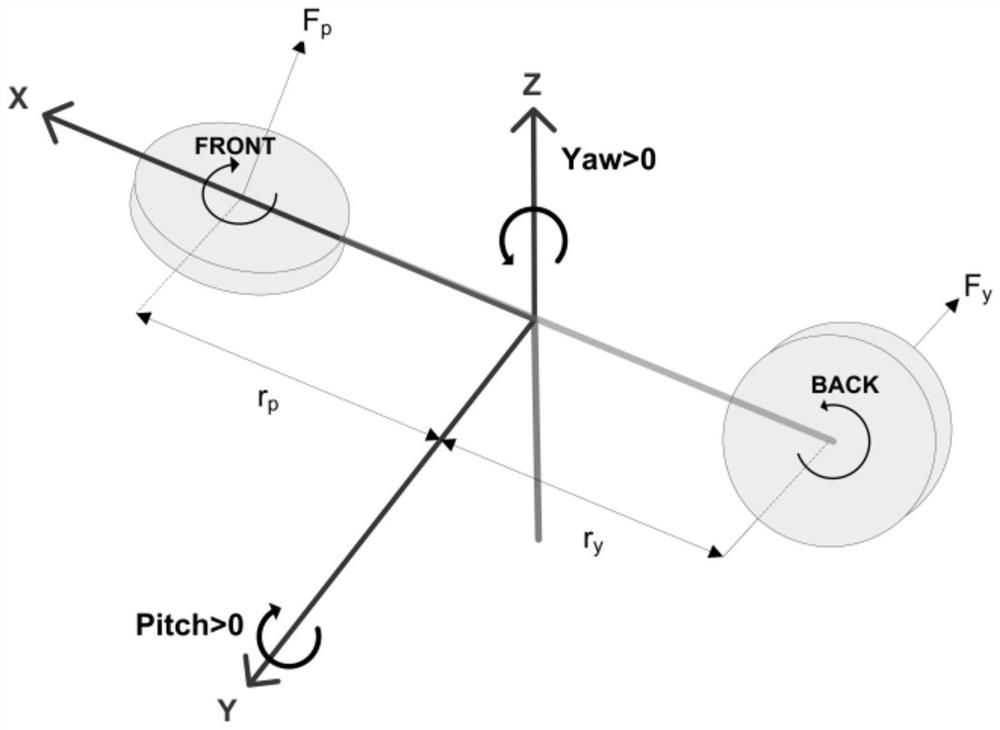
[0097] Step 1: Build the nonlinear model of the 2-DOF helicopter system;
[0098] In step 1, according to the Lagrangian mechanics model, the nonlinear dynamic equation of the system is as follows:
[0099]
[0100] Among them, J b and J d are expressed as moments of inertia about the pitch and yaw axes, respectively, V c is the voltage applied to the pitch rotor motor, V d is the voltage applied to the yaw rotor motor; M d represents the mass of the helicopter, l c Indicates the distance from the center of mass to the origin of the fixed frame of the fuselage, θ represents the pitch angle, φ represents the yaw angle, and K cpp Represents the torque thrust gain acting on the pitch axis in the pitch propeller, K cpy Represents the torque thrust gain acting on the pi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More