

Multi-camera calibration method in large scene, information processing terminal and storage medium
A calibration method and multi-camera technology, applied in the field of multi-view geometry, can solve the problems of low accuracy of registration images, poor complementarity, and low calibration accuracy, and achieve the expansion of quantity, improvement of usability, and high-precision multi-camera poses Calibration effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0086] In order to make the objectives, technical solutions and advantages of the present invention clearer, the present invention will be further described in detail below with reference to the embodiments. It should be understood that the specific embodiments described herein are only used to explain the present invention, but not to limit the present invention.
[0087] 1. Explain the embodiment. In order for those skilled in the art to fully understand how the present invention is specifically implemented, this part is an explanatory embodiment to expand the description of the technical solutions of the claims.
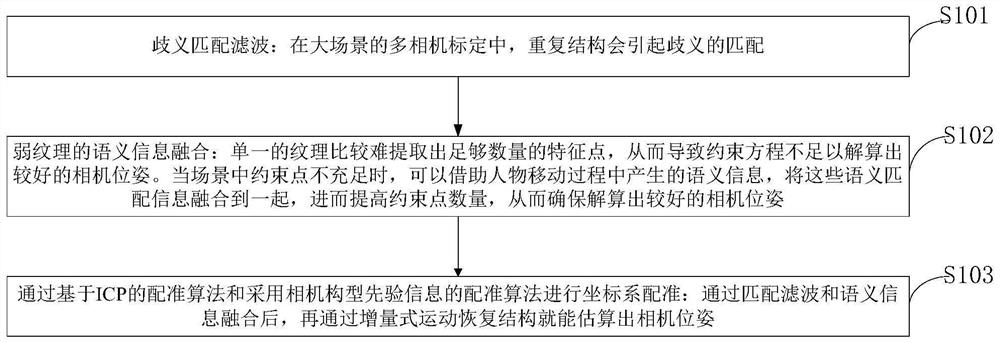
[0088] like figure 1 As shown, the multi-camera calibration method in a large scene provided by the present invention includes:
[0089] S101 , ambiguous matching filtering: in multi-camera calibration of a large scene, repeated structures can cause ambiguous matching.
[0090] S102, semantic information fusion of weak textures: it is difficult to extract a suf...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More