Shuttling robot with dynamic balance self-stabilizing function
A robot and self-stabilizing technology, applied in the field of shuttle robots, can solve the problems of the inability to transport the shuttle robot, the low applicability of the shuttle robot, and the large influence of material inertia, so as to reduce the impact, reduce the dependence, and improve the transportation effect.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The technical solutions in the embodiments of the present invention will be clearly and completely described below with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only a part of the embodiments of the present invention, but not all of the embodiments. Based on the embodiments of the present invention, all other embodiments obtained by those of ordinary skill in the art without creative efforts shall fall within the protection scope of the present invention.
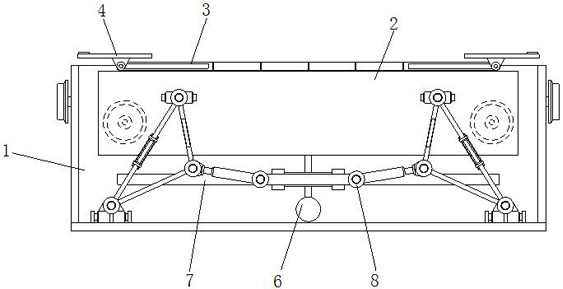
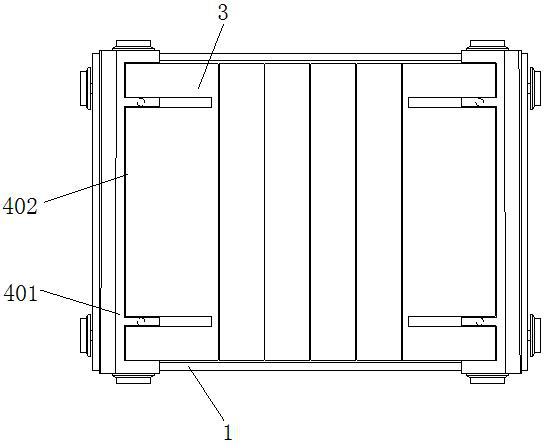
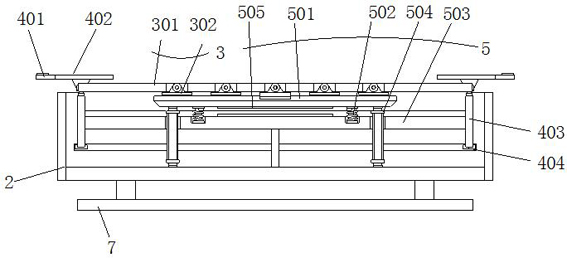
[0032] see Figure 1-Figure 12 , the present invention provides a technical solution: a shuttle robot with dynamic balance and self-stabilization function, comprising a casing 1, a frame 2 and a power wheel, the outer side of the casing 1 is provided with a power wheel, the interior of the casing 1 is provided with a frame 2, A load-bearing assembly 3 is provided inside, the load-bearing assembly 3 is used for placing goods, a restric...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More