

Cargo grabbing device for industrial robot
A technology of industrial robots and grabbing devices, applied in the direction of conveyor objects, manipulators, manufacturing tools, etc., can solve problems such as falling goods, reduce the probability of falling, ensure installation stability, and improve clamping stability Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
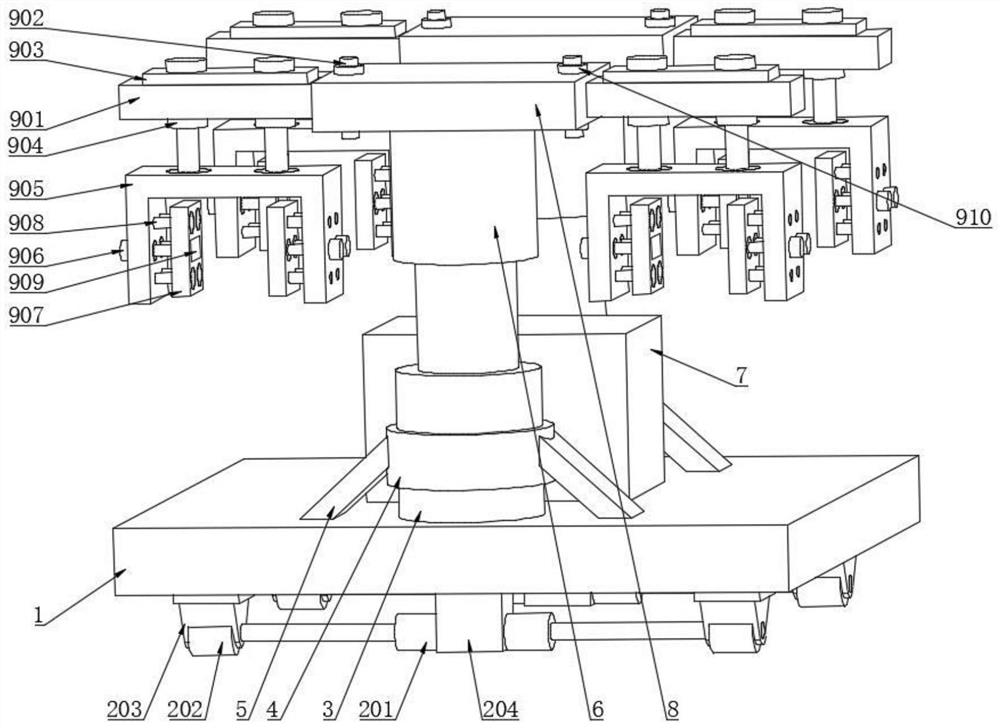
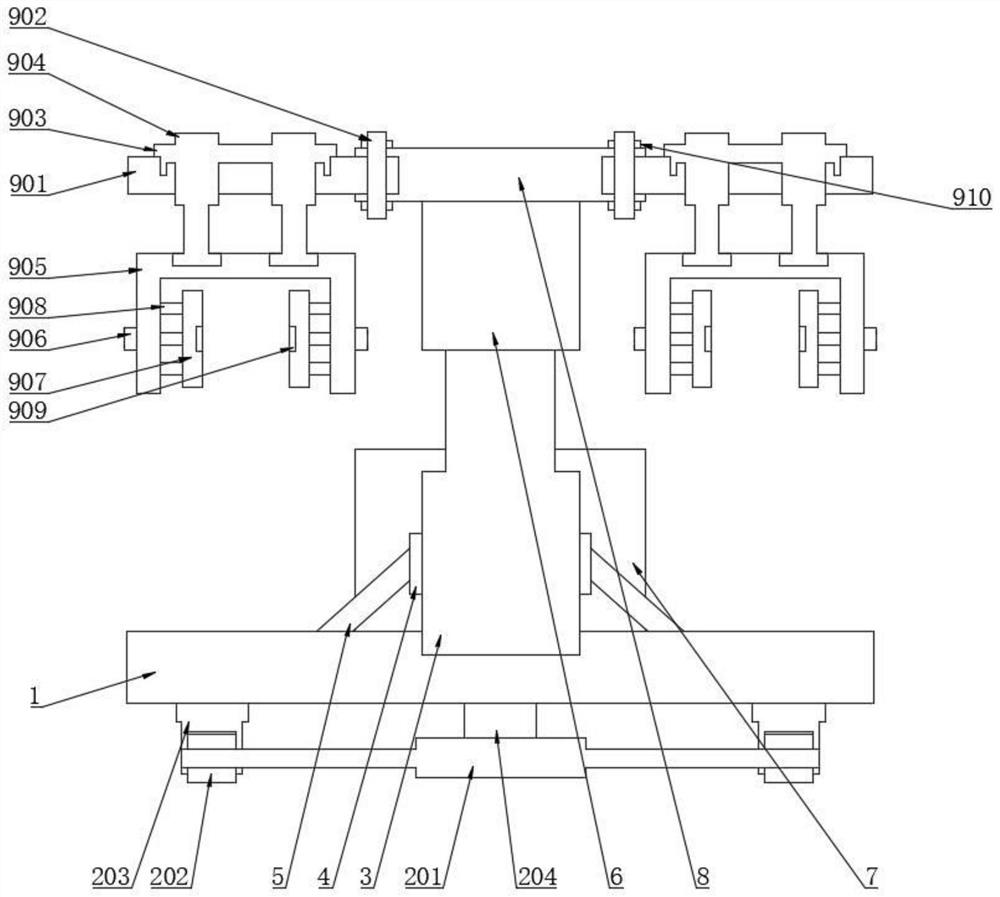
[0037] see Figure 1-5, a cargo grabbing device for industrial robots, including a pallet 1, which can ensure the working stability of the upper and lower parts under the action of the pallet 1, so as to ensure the actual use effect;
[0038] Also includes:
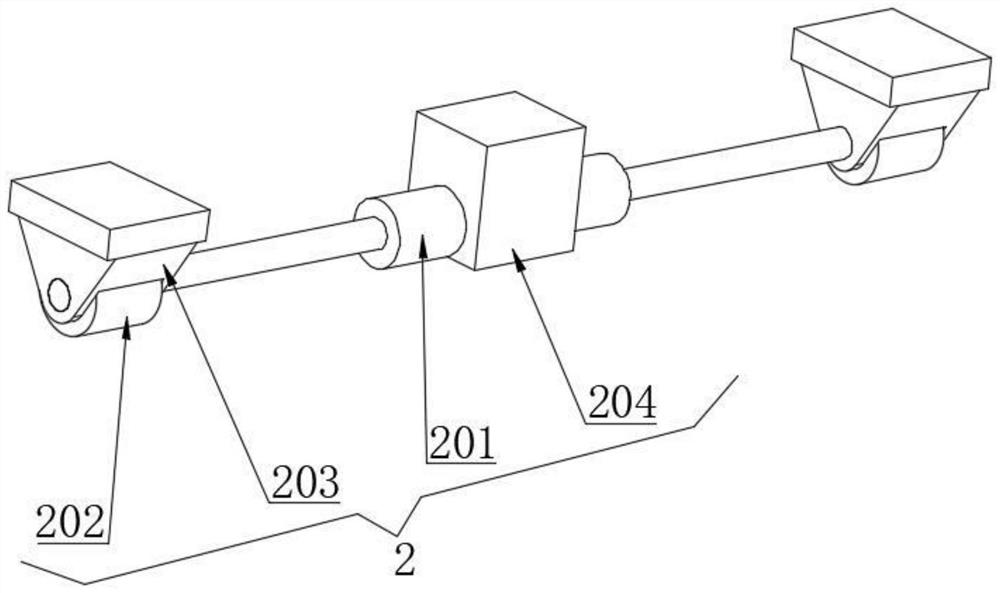
[0039] Two sets of symmetrically arranged moving mechanisms 2: each moving mechanism 2 includes a motor 201, a moving wheel 202 is sleeved on the circumferential surface of the motor shaft at both ends of the motor 201, and a protective frame 203 is provided outside the moving wheel 202; The start and stop of the motor 201 can be realized under the action of the motor 201, and the starter motor 201 can drive the motor shaft to make a circular motion, and can drive the moving wheel 202 to rotate under the action of the motor shaft, thereby realizing the moving purpose of the device.
[0040] Two symmetrically arranged electric push rods 3: the two electric push rods 3 are detachably installed on the upper end face of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More