

Robot with wheel-leg structure and control method thereof
A control method and robot technology, applied in the field of robots, can solve problems such as complex structure and instability, and achieve the effect of improving safety, good adaptability and improving operation efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
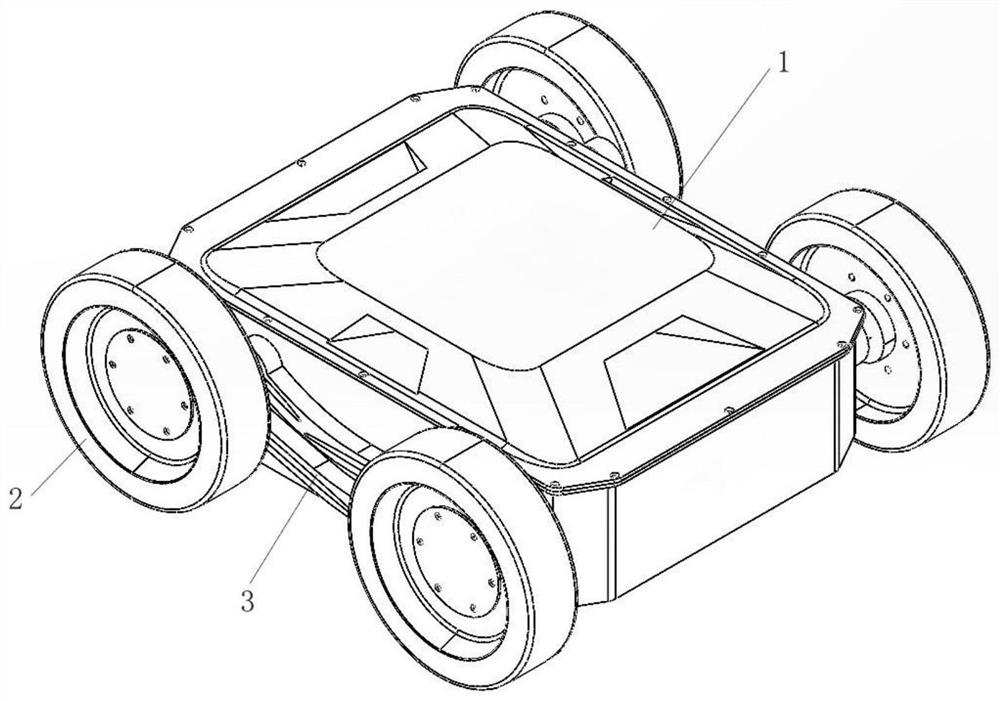
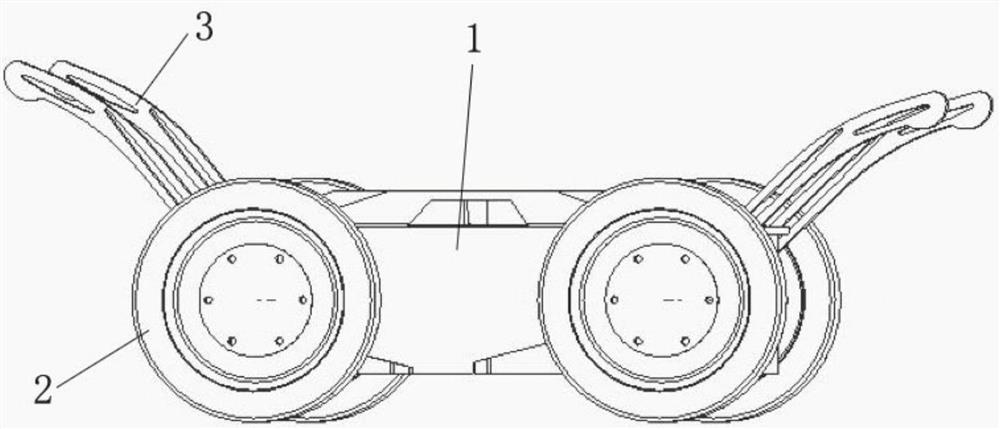
[0041] refer to Figure 1 to Figure 6 As shown, a robot with wheel and leg structure includes a body 1, a wheel 2, a mechanical leg 3, a connecting shaft 4, an independent drive mechanism, a clutch 7, an axial telescopic mechanism and a sleeve rod 10, and the independent drive mechanism includes a drive motor 5 , the axial telescopic mechanism includes a telescopic motor 8 and a telescopic push rod 9 , the clutch 7 includes a solenoid valve 6 , an inner contact plate 11 and an outer contact plate 12 .
[0042] The fuselage 1 is a rectangular box-shaped structure. The top of the fuselage 1 has openings in four directions: front, rear, left, and right. Cameras can be installed inside to collect visual information in four directions at the same time.
[0043] The four corners of the fuselage 1 correspond to four sets of wheels 2, mechanical legs 3, connecting shafts 4, independent drive mechanisms, clutches 7 and sleeve rods 10, and the front and rear of the fuselage 1 correspond...
Embodiment 2
[0055] refer to Figure 1 to Figure 7 As shown, a control method of the robot with the above-mentioned wheel-leg structure, when the robot is running normally, the connecting shaft 4 and the wheel 2 are driven to move by an independent driving mechanism, at this time the clutch 7 is disengaged, and the mechanical leg 3 is in a retracted state, parallel to the Both sides of the fuselage 1 do not rotate with the connecting shaft 4 .
[0056] When the robot encounters an obstacle that is difficult to cross, the control clutch 7 is closed. At this time, the mechanical leg 3 rotates together with the connecting shaft 4 to realize the rotating motion of the mechanical leg 3. Through the cooperation of each mechanical leg 3 and the wheel 2, the obstacle is completed. Behavior.
[0057] Due to the limited internal space of the robot and the limited resource allocation, the various parts of the robot are prone to failure in a nuclear emergency environment. Flow chart such as Figure...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More