

Industrial robot reliability test device and test method
A technology for industrial robots and test devices, applied in manipulators, manufacturing tools, comprehensive factory control, etc., can solve the problem of not being able to accurately characterize the working accuracy of industrial robots, not conforming to the test results of the pose accuracy test method, and measuring the required site and space. Limits and other issues, to achieve the effect of comprehensive low-cost reliability testing, improving reliability, and complete reliability testing
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0065] Example 1 Reliability test method of industrial robot reliability test device
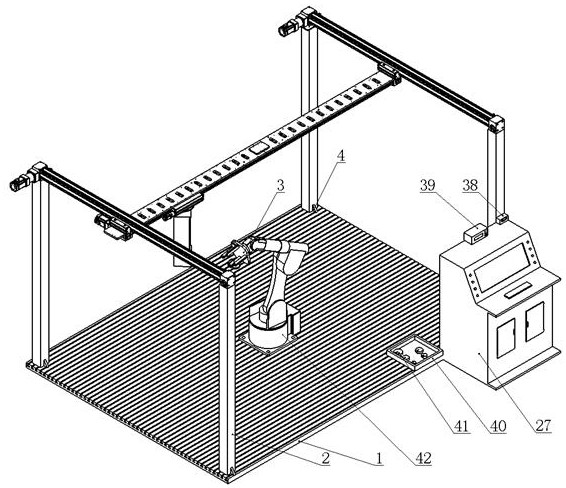
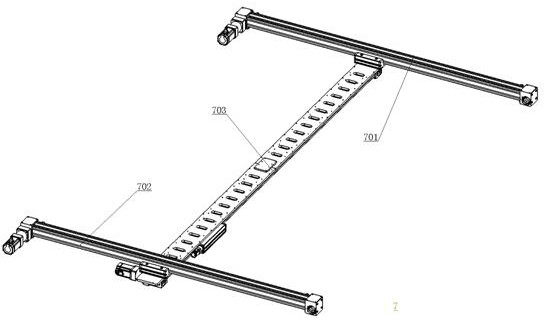
[0066] see figure 1 , the industrial robot reliability test device includes a floor rail (1), a support leg 2, a detection system 3, a reinforcing rib 4, etc.; refer to figure 2 , the servo feeding system includes No. 1 servo feeding system 701, No. 2 servo feeding system 702, No. 3 servo feeding system 703, among which: No. 1 servo feeding system and No. 2 servo feeding system have the same structure, No. 1 servo feeding system The servo feeding system and the No. 2 servo feeding system are installed on the support leg 2 on the horizontal iron (1) in parallel and symmetrically with respect to the longitudinal symmetry plane of the No. 3 servo feeding system 703 .
[0067] The horizon iron (1) is a cuboid-shaped plate casting, which is mounted on the foundation through the base platform therein, and the top of the horizon iron (1) is provided with T-shaped grooves with the same structure t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More