

Industrial robot-oriented reinforcement learning reward value calculation method
An industrial robot and reinforcement learning technology, which is applied in the field of reinforcement learning reward value calculation for industrial robots, can solve problems such as high state and behavior dimensions of industrial robots, and achieve the effect of speeding up the exploration process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0052] Embodiment 1: The present invention provides a reinforcement learning reward value calculation method for industrial robots, including the following steps:
[0053] S1: Initial calculation of industrial robot state parameters:
[0054] Specifically include steps:
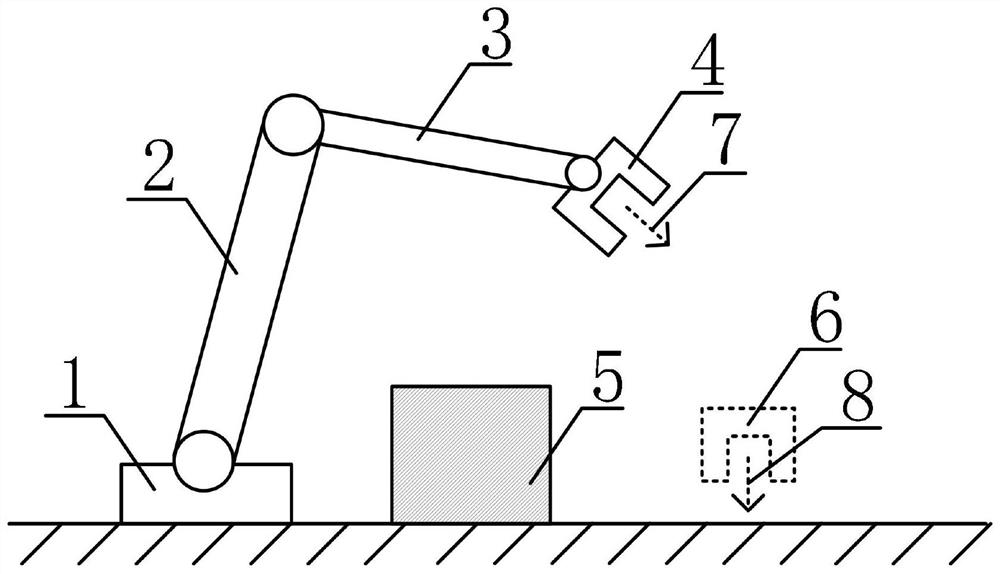
[0055] (1) Obtain the 3D point cloud distribution of obstacles in the working environment of industrial robots {p 1 ,p 2 ,…,p n }, and the target pose matrix of the industrial robot (In the matrix, R is a 3×3 rotation matrix representing the attitude, and P is a 3×1 translation matrix representing the position);
[0056] (2) According to the D-H parameters of the industrial robot, calculate the pose matrix of the robot end effector at the initial moment: The pose matrix at the previous moment: and the pose matrix at the current moment
[0057] (3) Calculate the shortest distance from the initial moment of the end effector of the industrial robot to the target according to the translation matrix P ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More