

Legged mobile robot and control method thereof, leg structure and mobile leg unit for legged mobile robot
A mobile robot and robot technology, applied in machine learning, digital computer components, instruments, etc., can solve problems such as strong anti-interference ability, difficult robot, weak anti-interference ability, etc., and achieve the effect of strong anti-interference ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0157] Embodiments of the present invention are discussed below with reference to the accompanying drawings.
[0158] A. The structure of the robot
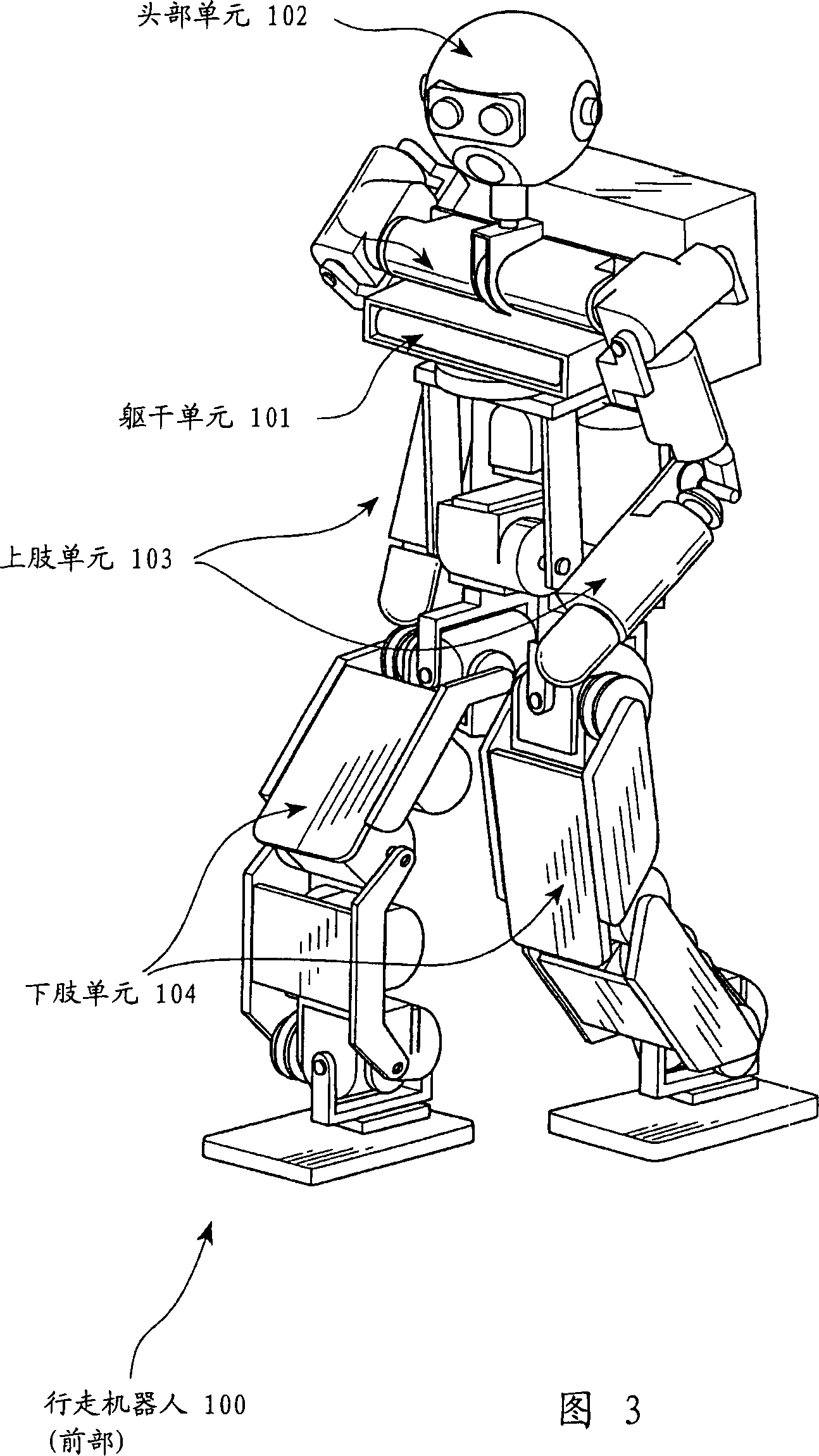
[0159] Figure 3 and Figure 4 The front and rear of a "humanoid" or "humanoid" legged locomotion robot 100 embodying the invention are shown in an upright position. As shown, the legged mobile robot 100 includes a trunk unit 101, a head unit 102, left and right upper limb units 103, left and right lower limb units 104 for walking, and a controller 105 generally controlling the operation of the robot body.
[0160] Each includes thighs, knee joints, calves, ankles, and feet, and the lower limb unit 104 is connected near the lower end of the torso unit by hip joints. Each of the left and right upper limb units 103 includes an upper arm, an elbow joint, and a forearm, and the upper limb unit 103 is connected to upper left and right sides of the trunk unit through shoulder joints. The head unit 102 is connected near the upper mi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More