

Mobile robot control system and teleoperation control method of robot tail end pose
A mobile robot and teleoperation control technology, which is applied in the direction of program control of manipulators, manipulators, manufacturing tools, etc., can solve the problems of inability to intuitively control the terminal pose of the vehicle-mounted multi-degree-of-freedom reconnaissance system, complex control methods, etc., and achieve reliable control methods , The control process is intuitive and the control method is simple
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
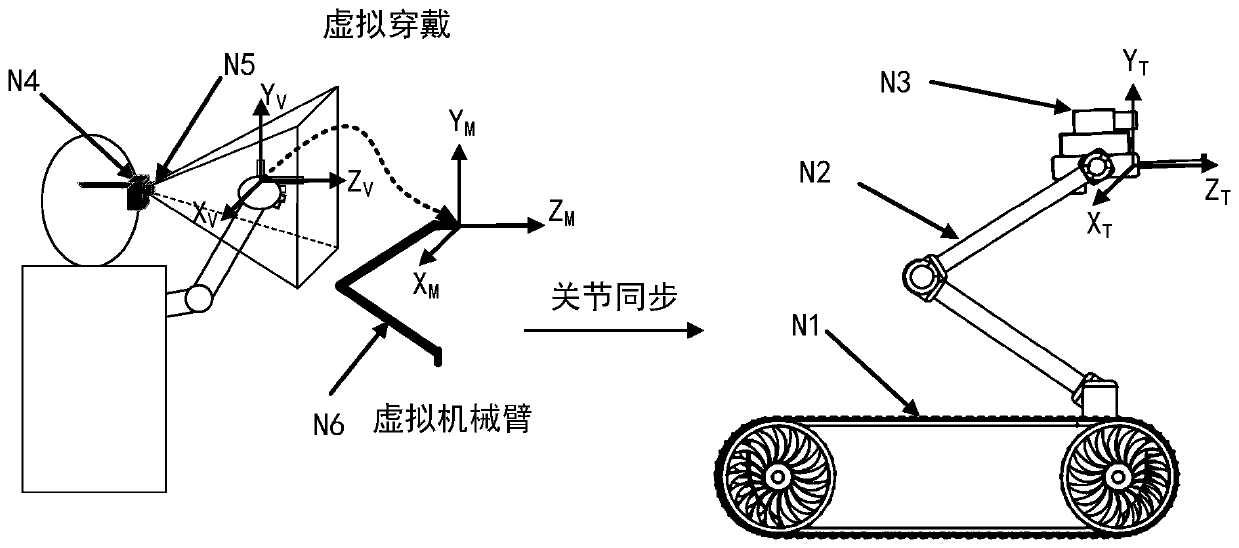
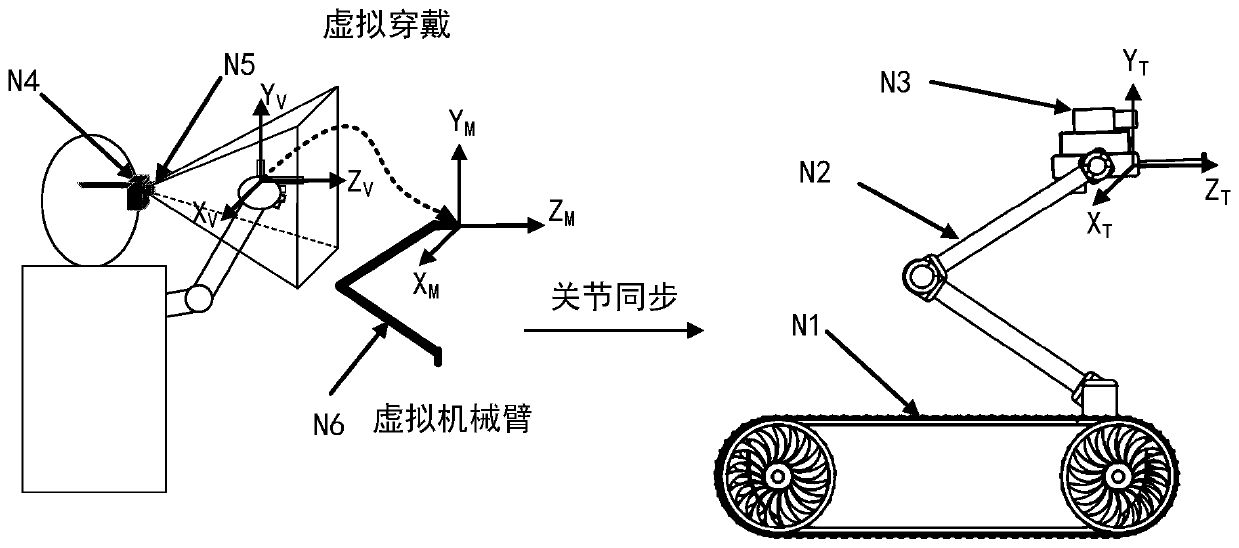
[0035] In the technical solutions disclosed in one or more embodiments, such as figure 1 and 2 As shown, a mobile robot control system includes a master-end wearable teleoperation control device and a slave-end robot, the master-end wearable teleoperation control device and the slave-end robot communicate through wireless, and the master-end wearable teleoperation The control device is worn on the operator to send control commands and receive data collected from the end robot;
[0036]The wearable remote operation control device at the main end includes a wearable binocular camera device, a head-mounted virtual display, a remote operation controller and a main-end wireless communication device. The display is connected to the main-end wireless communication device, and the wearable binocular camera device is used to collect images of the operator's gestures. The head-mounted virtual display is used for displaying images taken by the slave robot and for displaying a virtual m...
Embodiment 2
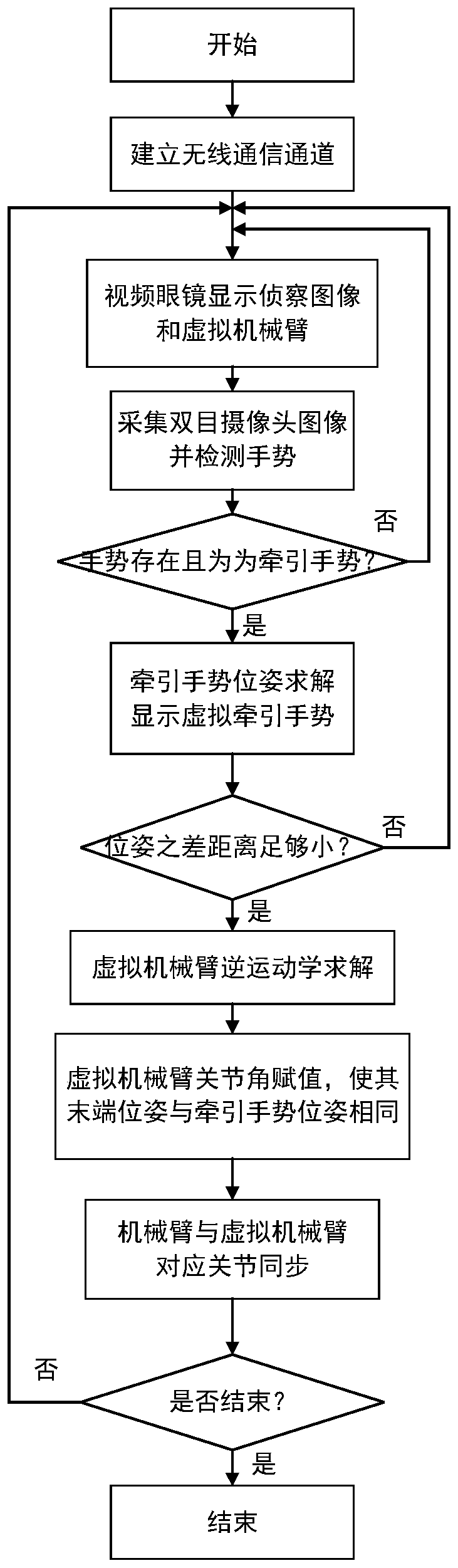
[0045] This embodiment provides a teleoperation control method for the robot terminal pose based on the mobile robot control system described in Embodiment 1, such as Figure 1-3 As shown, the specific is the multi-degree-of-freedom manipulator end pose teleoperation control method, which can realize the continuous control of the position and attitude of the end of the manipulator through the movement of gestures, including the following steps:
[0046] Step 1. Set the traction hand type and the removal hand type;
[0047] The pulling hand type means that when the operator is detected as this hand type, the pose of the virtual gesture model is kept coincident with the pose of the end of the virtual mechanical arm in the video glasses, and the operator can drive the video glasses through the pose of the gesture The position and posture (ie pose) of the virtual gesture model in N4, the virtual gesture model can perform real-time continuous control on the pose of the end of the v...
Embodiment 3
[0098] This embodiment also provides an electronic device, including a memory, a processor, and computer instructions stored in the memory and run on the processor. When the computer instructions are executed by the processor, the method in the first embodiment is completed. step.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More