

Servo motor drive control device
A technology of servo motor and drive control, applied in the field of learning control, can solve problems such as difficult machining, and achieve the effect of reducing position deviation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
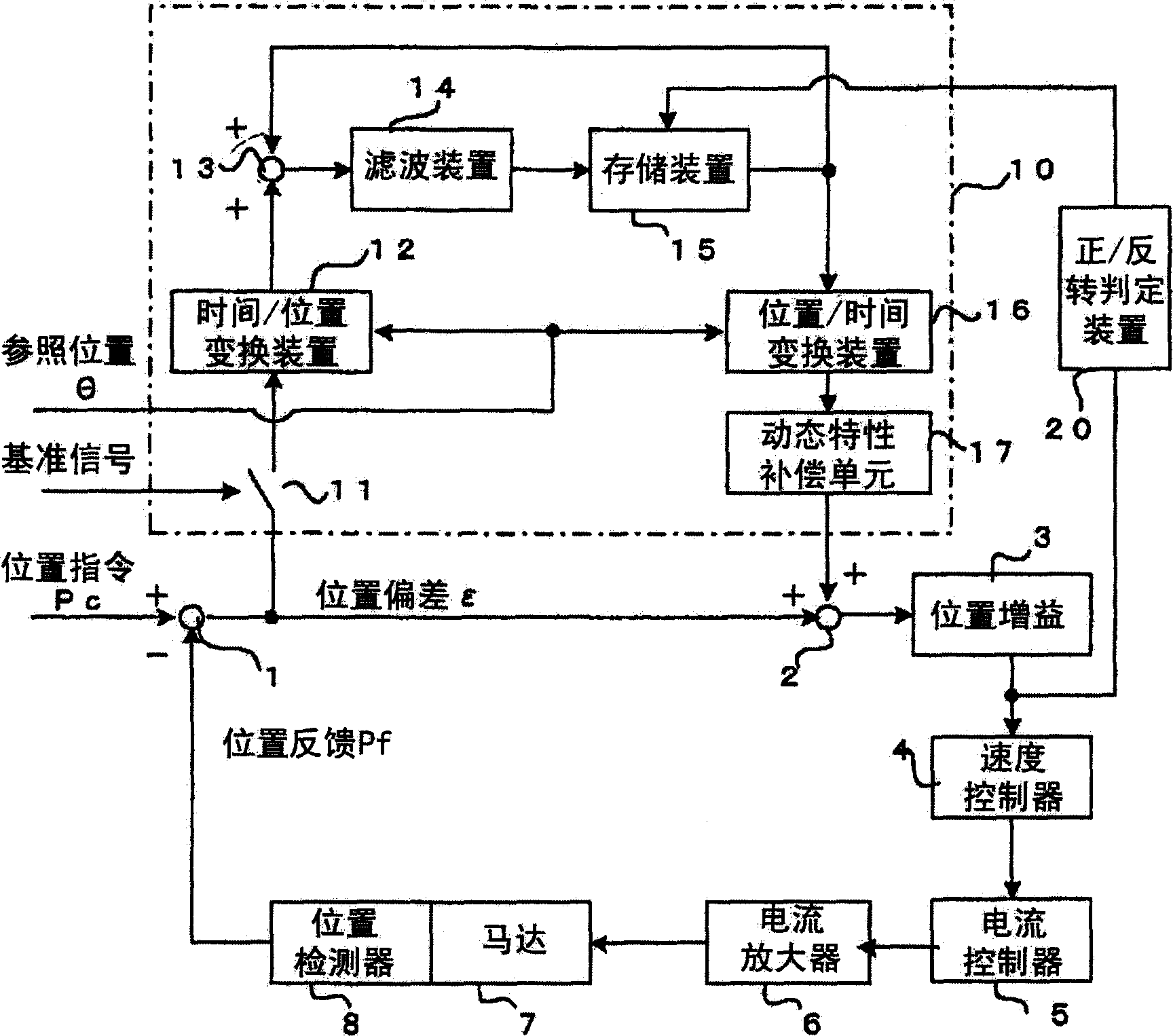
[0031] figure 1 It is a block diagram of main parts of the first embodiment of the present invention.
[0032] In the arithmetic unit 1, the position command Pc output from the upper control device such as a digital control device is subtracted from the servomotor mounted on the servomotor 7 to detect the position of the servomotor (or the position of the driven body driven by the servomotor). The feedback position Pf of the position detector 8 is used to obtain the position deviation ε. Then, the arithmetic unit 2 adds a correction amount from the learning control device 10 described later to the position deviation ε for correction, and multiplies the corrected position deviation by the position gain 3 to obtain a speed command. That is, position loop control processing is performed to obtain a speed command.
[0033]For this speed command, the speed loop control process is performed by the speed controller 4 (obtaining the speed deviation as the difference between the spee...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More