

Fluid driving bending joint of spiral spring frame
A technology of helical springs and bending joints, applied in the direction of claw arms, manipulators, manufacturing tools, etc., can solve the problems of energy consumption, high manufacturing cost, and complex structure, and achieve high dynamic control accuracy, easy axial deformation, and small fluid flow Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] Below the present invention will be further described in conjunction with the implementation of scheme I in the accompanying drawings:
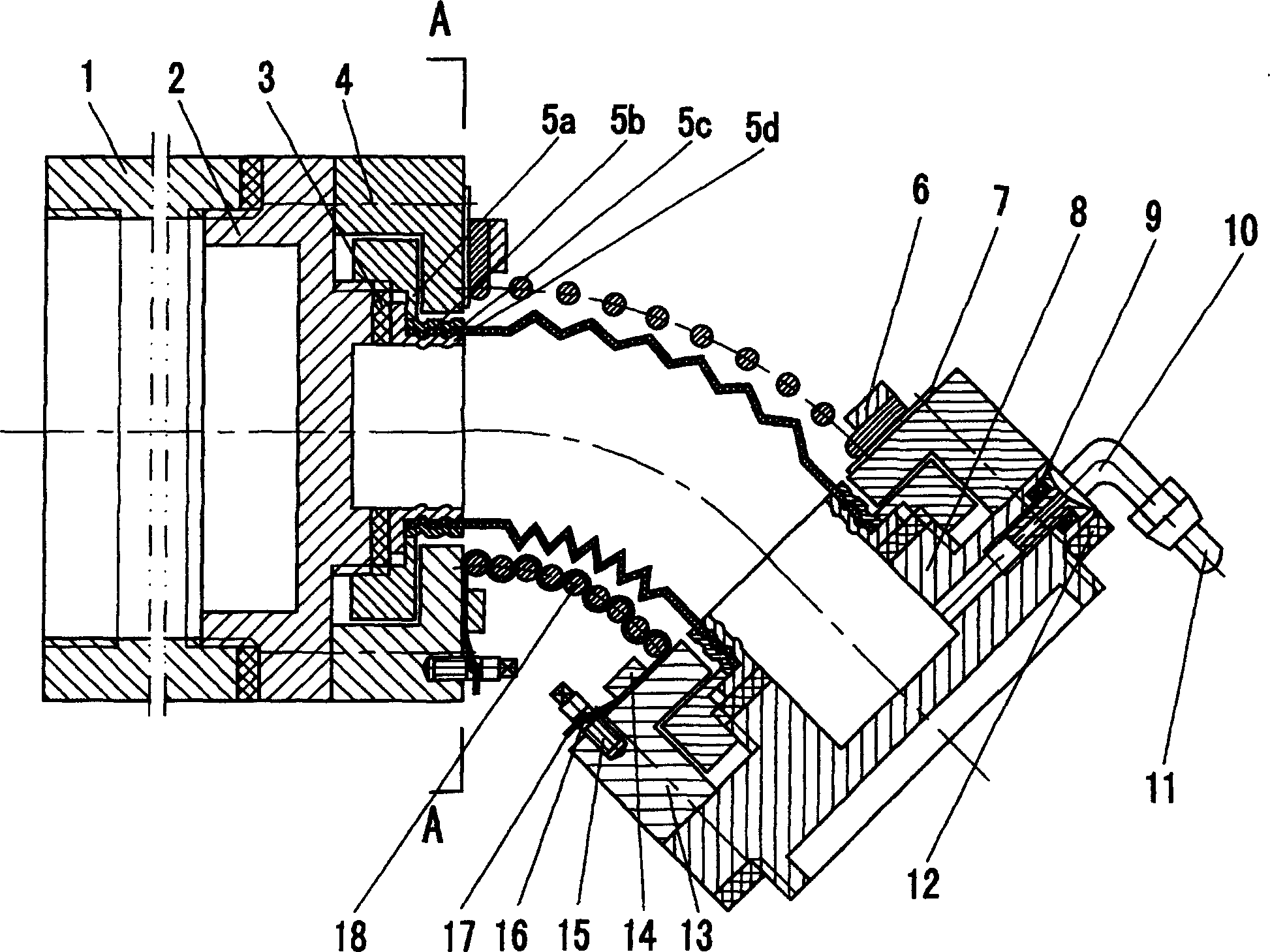
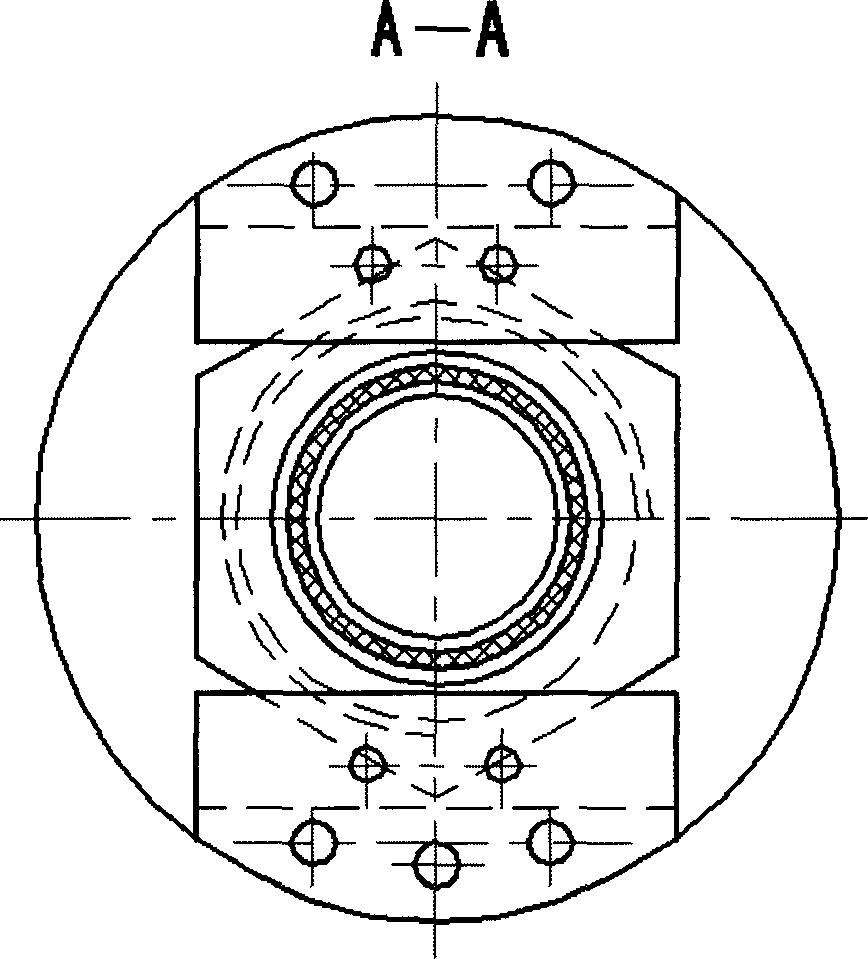
[0029] The joint of plan I is mainly composed of intermediate section 1, head seat 2, large sealing ring 3, spring fixing seat 4, connecting sealing nut 5a, fastening shell 5b, elastic wave shell 5c, flange inner sleeve 5d, spring fixing pressure plate 6, Adjusting gasket 7, tailstock 8, small sealing ring 9, right-angle pipe joint 10, hose 11, thickness adjusting ring 12, tensioning wire seat 13, wire guide frame 14, tensioning screw 15, fixing screw 16, fixing wire 17, helical spring 18, annular weft 19, winding warp 20 etc. constitute.
[0030] Its specific implementation method is:
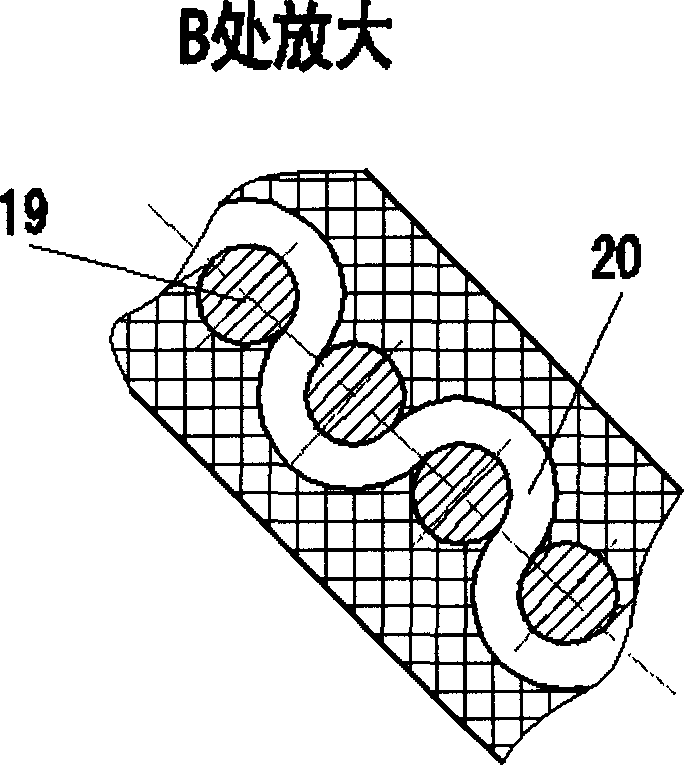
[0031] (1) The longitudinal section shape of the single elastic wave shell of the elastic wave shell 5c is "V", "U" or "Ω". through
[0032] 20. In this way, the elastic wave shell 5b is not easily deformed in the radial direction, and its bearing c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More