

Fluid driven, single-freedom and flexible bending joint
A bending joint, fluid-driven technology, applied in artificial arms, artificial legs, manipulators, etc., can solve problems such as the inability to obtain a more accurate mathematical model for the bending deformation of the rubber wall, the poor dynamic control effect, and the insensitive movement, etc., to achieve dynamic control. High precision, small duty cycle, and low power/mass ratio
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] Below the present invention will be further described in conjunction with the embodiment in the accompanying drawing:
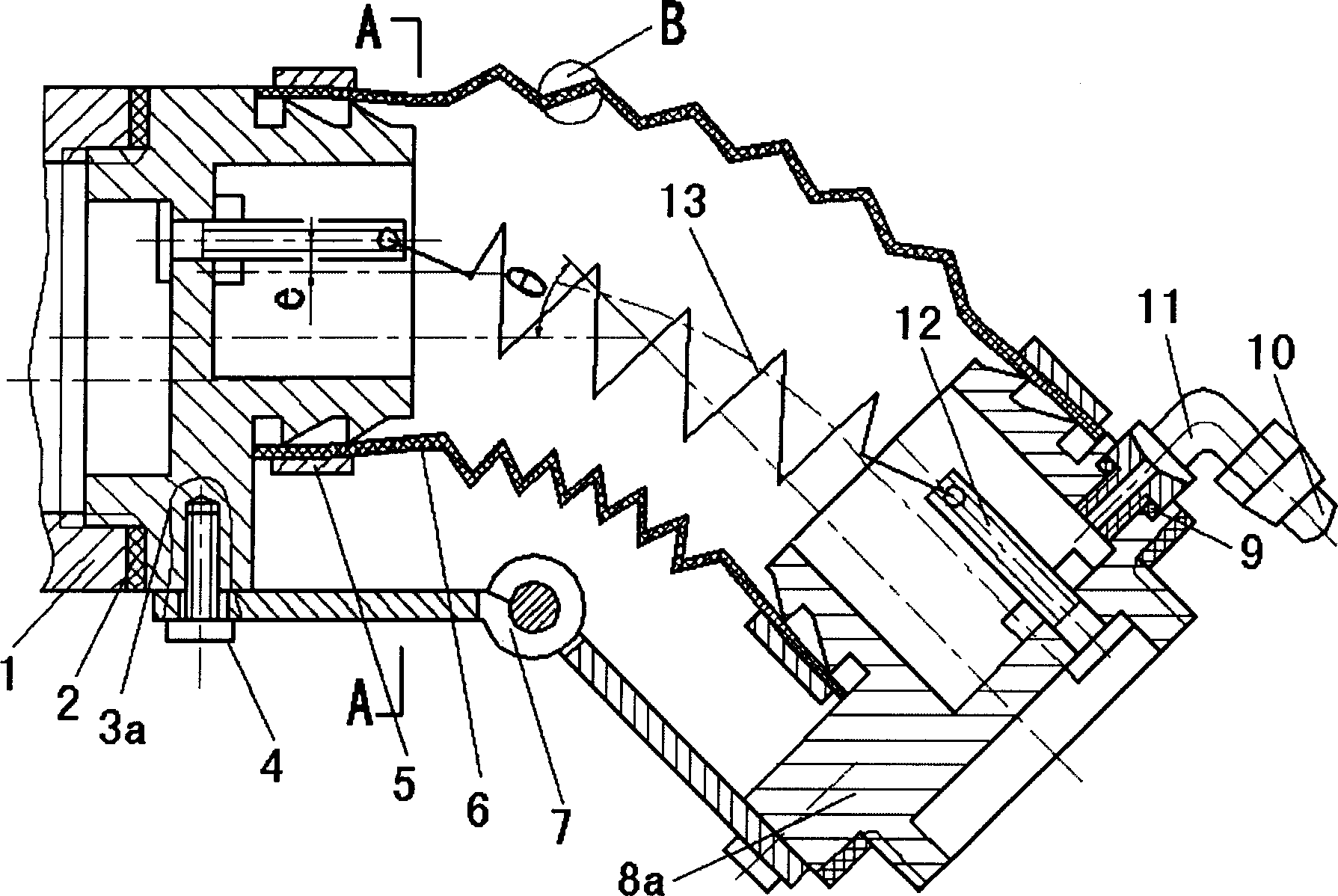
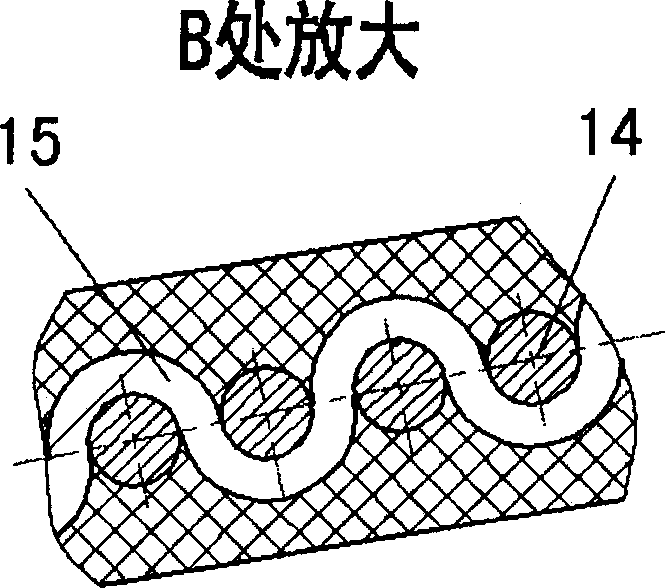
[0021] The present invention mainly consists of a finger cot 1, an adjusting gasket 2, a head seat 3a, a non-porous head seat 3b, a screw 4, a hoop 5, an elastic wave shell 6, a plate hinge 7, a tail stock 8a, a non-porous tail stock 8b, a seal Ring 9, hose 10, joint 11, hook shaft 12, tension spring 13, annular weft 14, warp 15, elastic strip 16, locking plate 17, torsion spring 18 and the like.
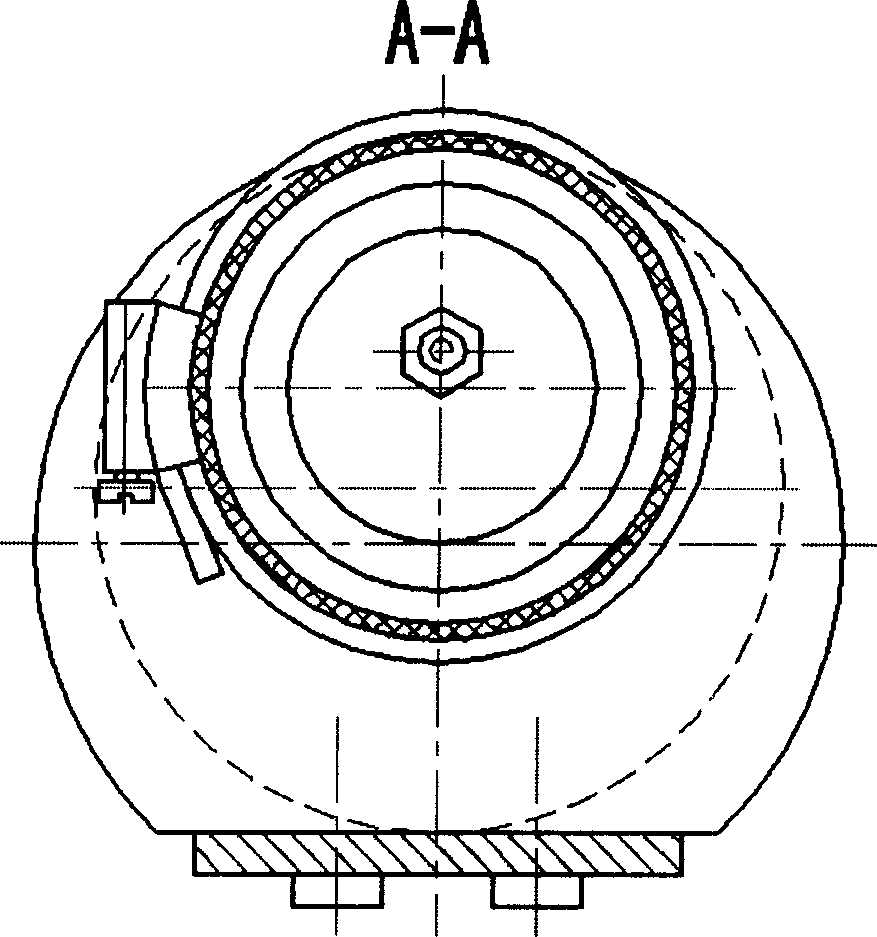
[0022] as attached figure 1 , 2 The first solution shown is: the elastic wave shell 6 is clamped on the bayonet of the headstock 3a and the tailstock 8a by the clamp 5, and the elastic wave shell 6, the headstock 3a and the tailstock 8a form a closed cavity; The fluid enters the joint cavity through the hose 10 and the joint 11, the joint 11 is screwed on the tailstock 8a, and there is a sealing ring 9 in the middle for sealing; the two ends of the plate h...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More