

High performance intelligent controlling computer system for underwater robot
A technology of underwater robots and computer systems, applied in manipulators, manufacturing tools, etc., can solve problems such as poor stability, uncompact structure, and large volume, and achieve high reliability, simple structure, and the effect of expansion or cutting
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
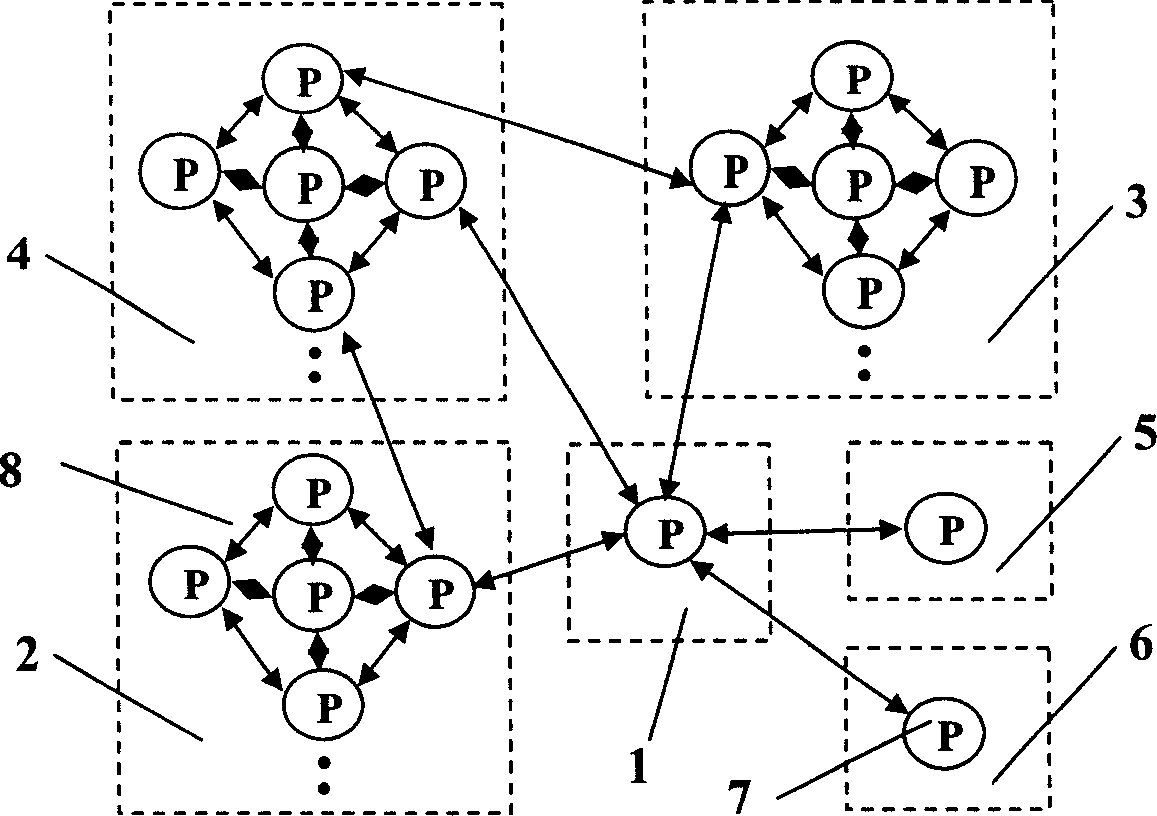
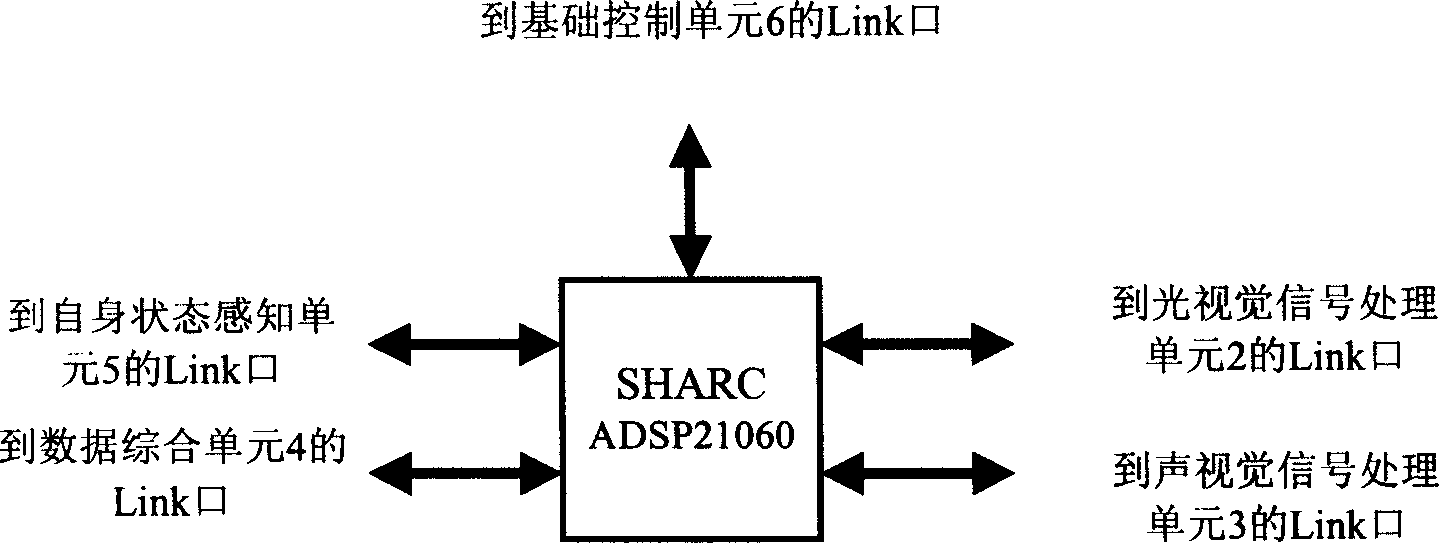
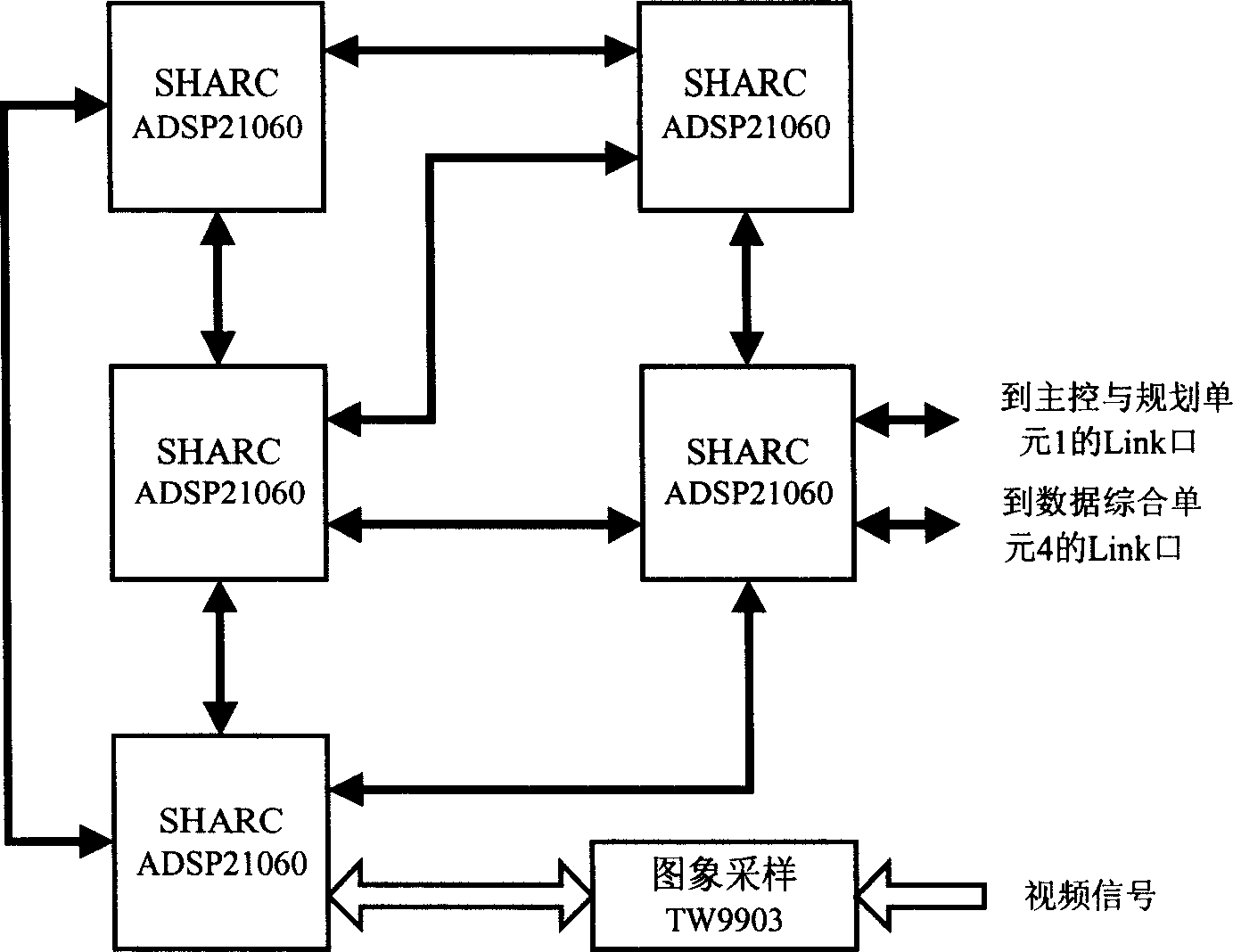
[0020] exist Picture 1-1 , each box represents a functional unit, the high-performance underwater robot intelligent control computer system, including the main control and planning unit 1, the optical and visual signal processing unit 2, the acoustic and visual signal processing unit 3, the data integration unit 4, and its own state Sensing unit 5 and basic control unit 6, each unit contains signal processor 7 with multi-channel high-speed Link port 8; Wherein light-visual signal processing unit 2, sound-visual signal processing unit 3, data integration unit 4 according to the data processing capacity It is required to use 2-12 node signal processors 7 to realize; the optical and visual signal processing unit 2, the acoustic and visual signal processing unit 3, the data integration unit 4, the self-state perception unit 5, and the basic control unit 6 are respectively connected with the main control and planning Units 1 are interconnected by a high-speed Link port, and data co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More