

Accessory manipulation of throat surgery robot
A surgical robot and manipulator technology, applied in the fields of surgery, manipulators, medical science, etc., can solve the problems of the doctor's operation trouble, uncomfortable operation, hand interference, etc., to improve the overall operability, the operation is light and flexible, and the weight is reduced. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
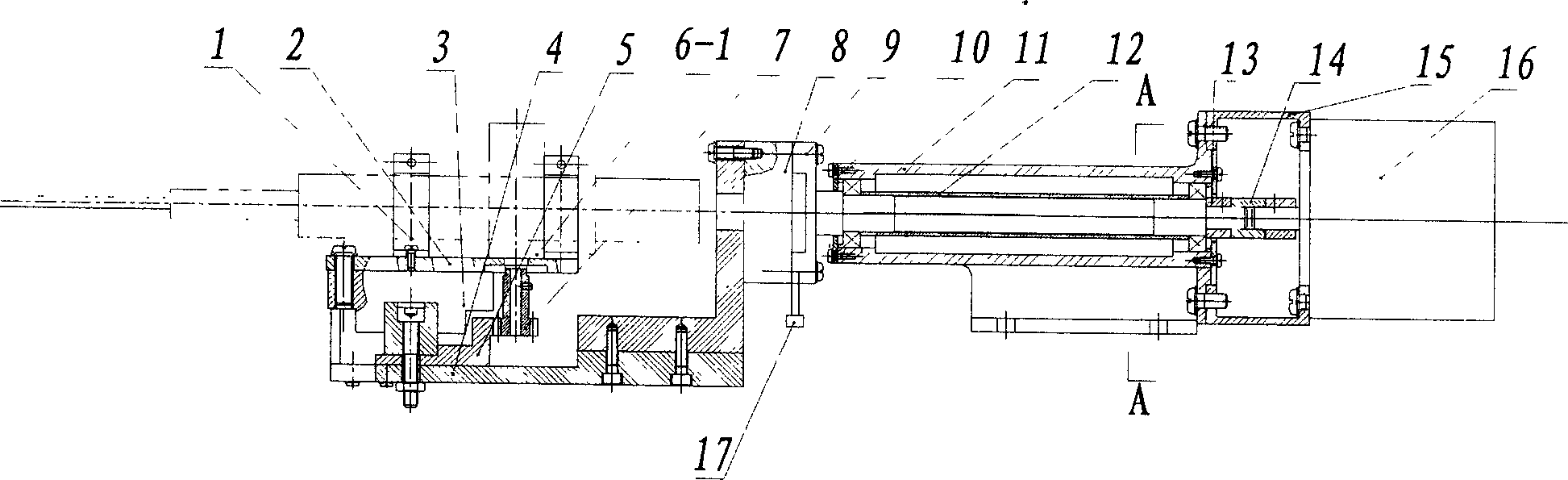
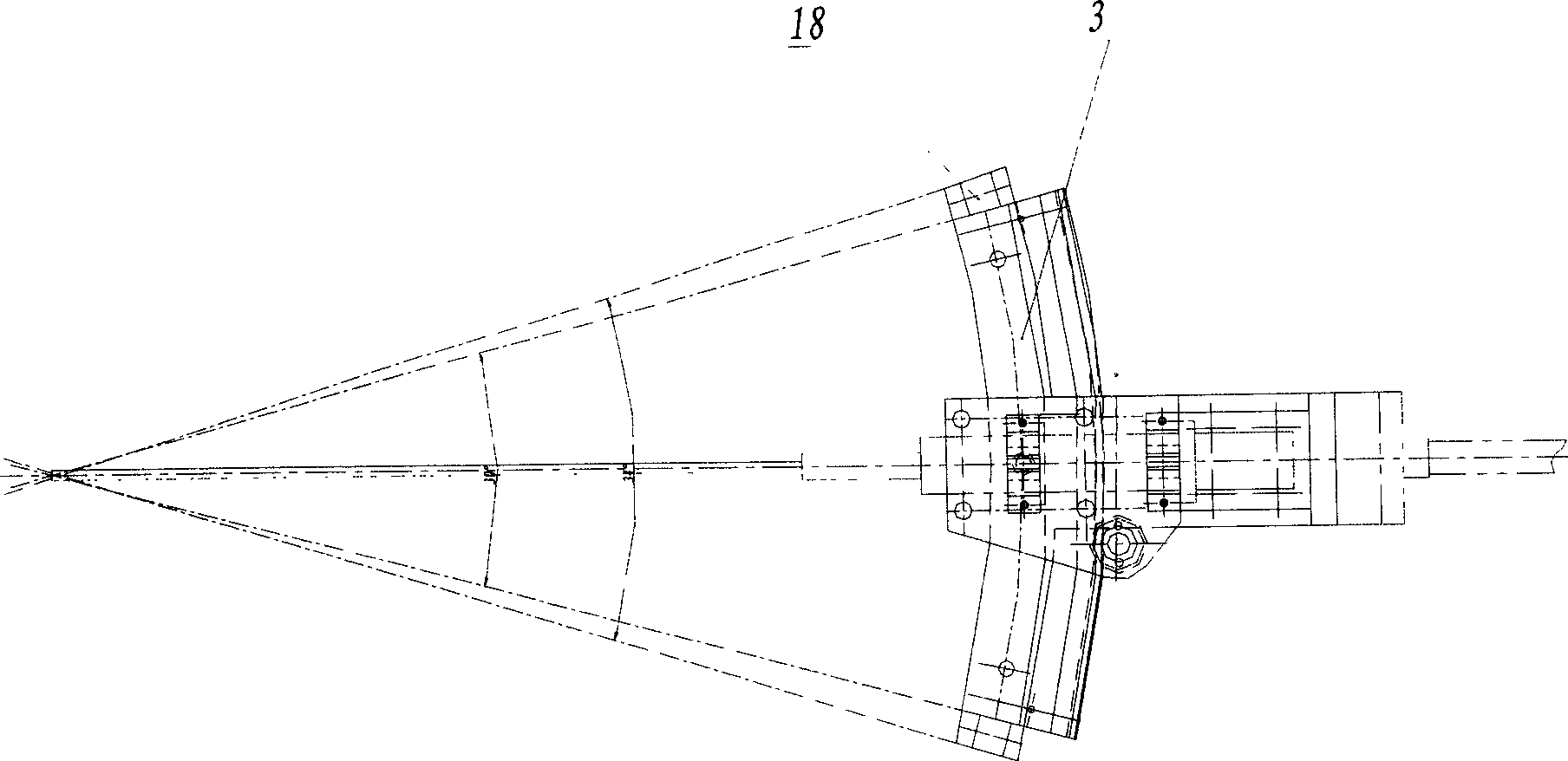
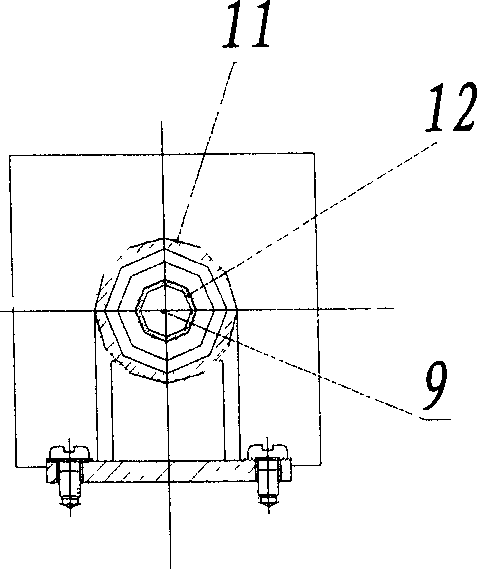
[0031] figure 1 , 2, 3 illustrates the posture adjustment joints, the arc motion joints of the fingers are active joints, and the motion of the joints is provided by the voltage-type stepping drive arc guide motor 6-1, and is realized through the rack-and-pinion mechanism . The motor 6-1 and the clamp 1 for clamping fingers are installed on the support plate 2, and the support plate 2 and the slider of the arc guide rail 3 are fixed together and can slide freely on the arc guide rail; the guide rail of the arc guide rail 3 The tooth sector 5 is fixed with the arc guide rail bracket 4; the motor 6-1 is fixed on the support plate 2, and the pinion 7 is mounted on the shaft of the motor 6-1, and can roll freely on the tooth sector 5. The arc motion is that the shaft of the motor 6-1 drives the support plate 2 to move on the arc guide rail 3 through the ...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Radius | aaaaa | aaaaa |
| Radius | aaaaa | aaaaa |
| Angle | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More