

Deep-water submersible biorobot of cuttlefish imitation type mollush
A technology of bionic robots and molluscs, applied in the direction of automatic toys, non-rotating propulsion components, toys, etc., can solve the problems of complex overall structure, poor flexibility, and difficult manufacturing
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
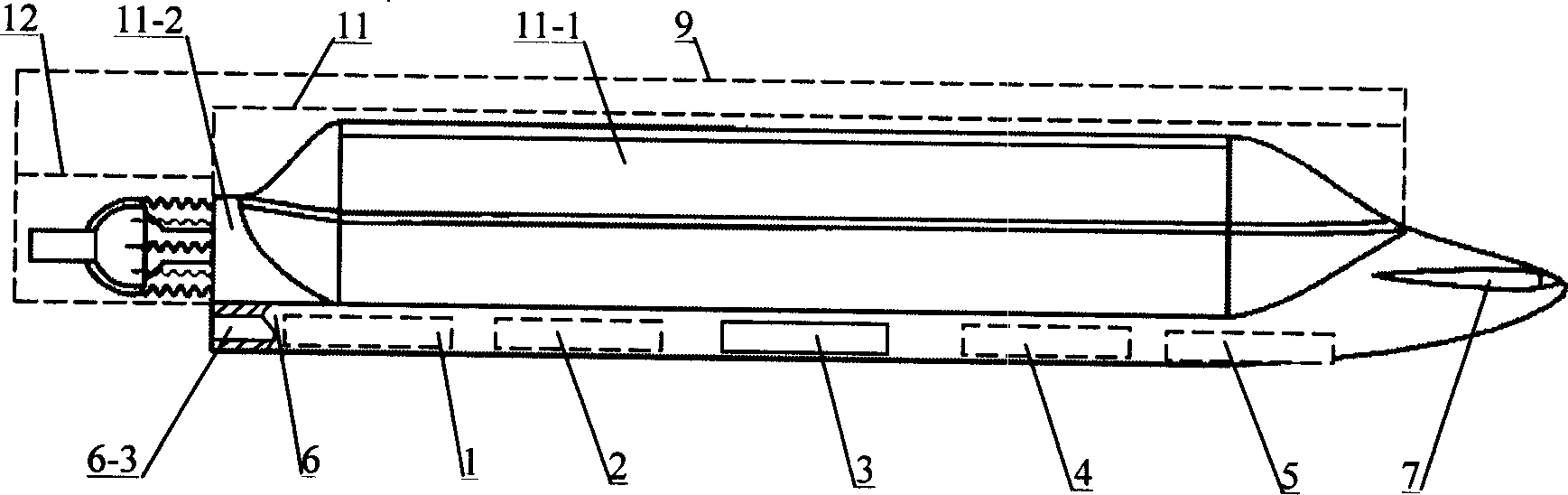
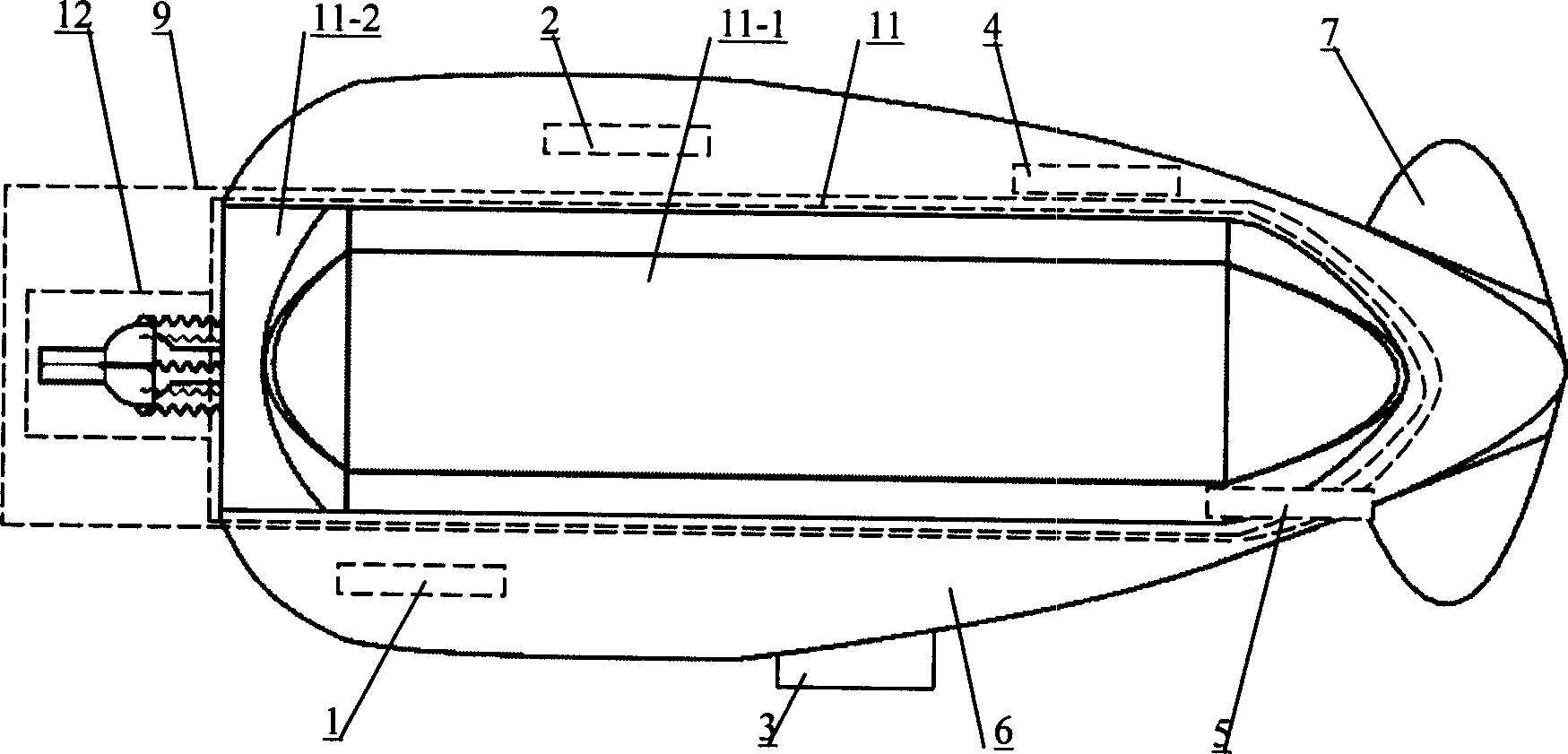
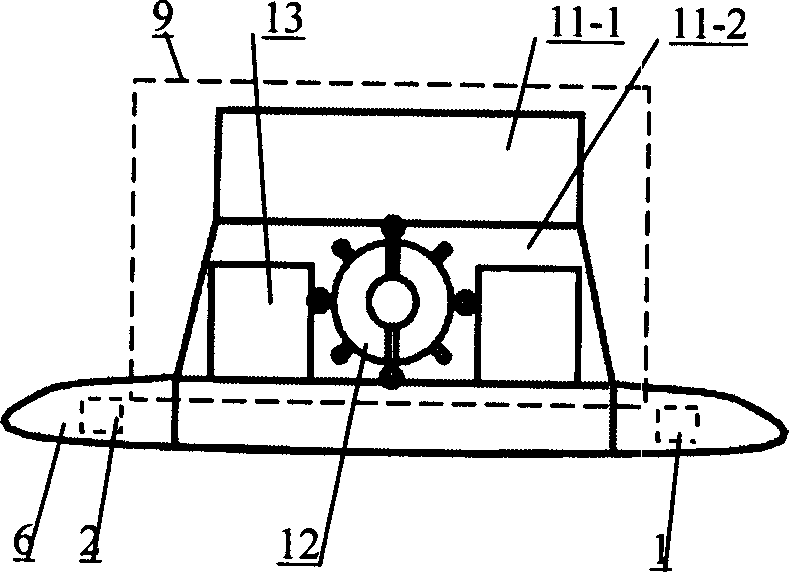
[0006] Specific implementation mode one: combine figure 1 , figure 2 , image 3 Describe this embodiment, this embodiment is made up of battery 1, control computer 2, ups and downs control device 3, motion control circuit 4, communication device 5, base body 6, monopulse thruster 9 and fin controller 7; The cavity of base body 6 6-3 are respectively fixed with a battery 1, a control computer 2, a motion control circuit 4, and a communication device 5; A fin controller 7 is fixed on the substrate 1 at the right end of the device 9 .
specific Embodiment approach 2
[0007] Specific implementation mode two: combination Figure 4 , Figure 5 , Image 6To illustrate this embodiment, the monopulse propeller 9 of this embodiment is composed of a cavity 11, a nozzle assembly 12, a cavity shape memory alloy driver 17, a cavity return spring 18, and a water inlet device; the cavity 11 is composed of a skin cavity 11-1 and the chamber 11-2; the left end of the skin chamber 11-1 is connected to the chamber 11-2 as a whole, and the skin chamber 11-1 is composed of a top plate 11-1-1, a bottom plate 11-1-2, The skin 11-1-3 is composed; the bottom plate 11-1-2 and the top plate 11-1-1 are fixedly connected through the skin 11-1-3 to form a skin cavity 11-1, and the bottom plate 11-1-2 and the base body 6 Fixed connection, a set of cavity shape memory alloy drivers 17 and a set of cavity return springs 18 are connected between the top plate 11-1-1 and the bottom plate 11-1-2, the cavity 11 is provided with a water inlet device, the cavity The left e...
specific Embodiment approach 3
[0008] Specific embodiment three: This embodiment is described in conjunction with Fig. 8, Fig. 9, and Fig. 10. The nozzle assembly 12 of this embodiment consists of a nozzle 12-1, a shape memory alloy driver 12-2 for controlling the rotation of the nozzle, and a nozzle return spring 12- 3. The nozzle pipe support 12-4, the first connection frame 12-5, the second connection frame 12-6, the third connection frame 12-7, and the fourth connection frame 12-8; the right end of the nozzle pipe support 12-4 Fixedly installed in the through hole of the left end face 11-2-3 of the chamber 11-2, the spherical surface 12-4-1 of the left end of the nozzle pipe support 12-4 is contained in the spherical cavity 12-1-1 of the nozzle 12-1 Inside and hinged with the nozzle 12-1, the spherical outer surface 12-1-2 of the nozzle 12-1 is symmetrically fixed with a group of first connecting frames 12-5 and a group of second connecting frames 12-6 along the circumferential direction, which are conne...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More