

Joint structure for rehabilitation training robot
A rehabilitation training and robotics technology, applied in manipulators, manufacturing tools, joints, etc., can solve the problems of complex safety design, hidden dangers of rehabilitation training, etc., to achieve self-locking characteristics, easy to achieve switching, and improve safety.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The joint mechanism of the rehabilitation training robot of the present invention will be described in detail below with reference to the accompanying drawings and specific embodiments.
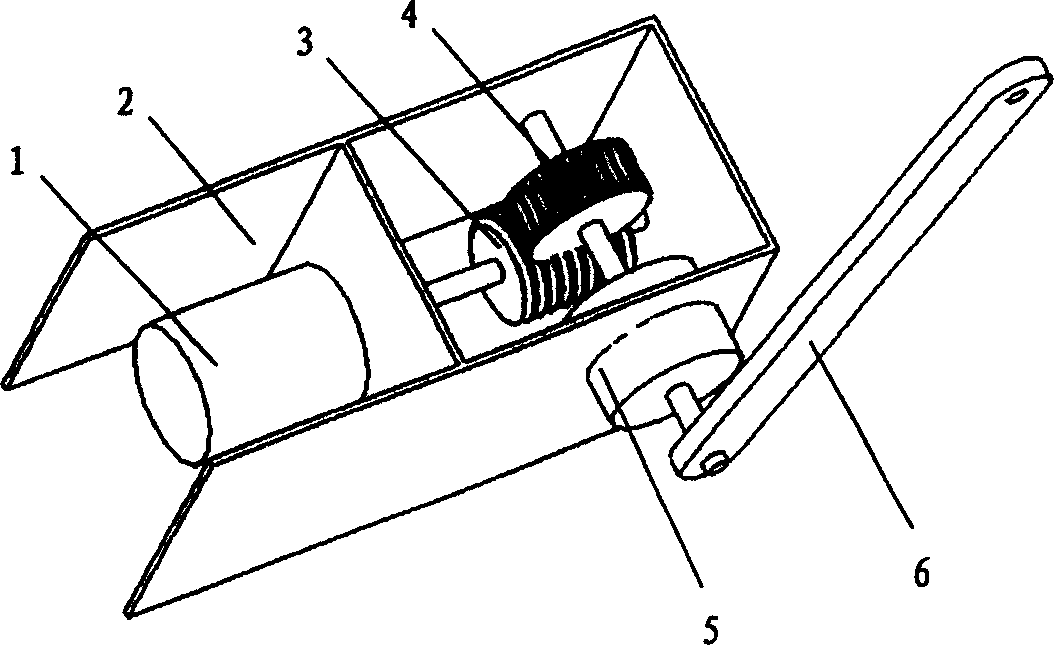
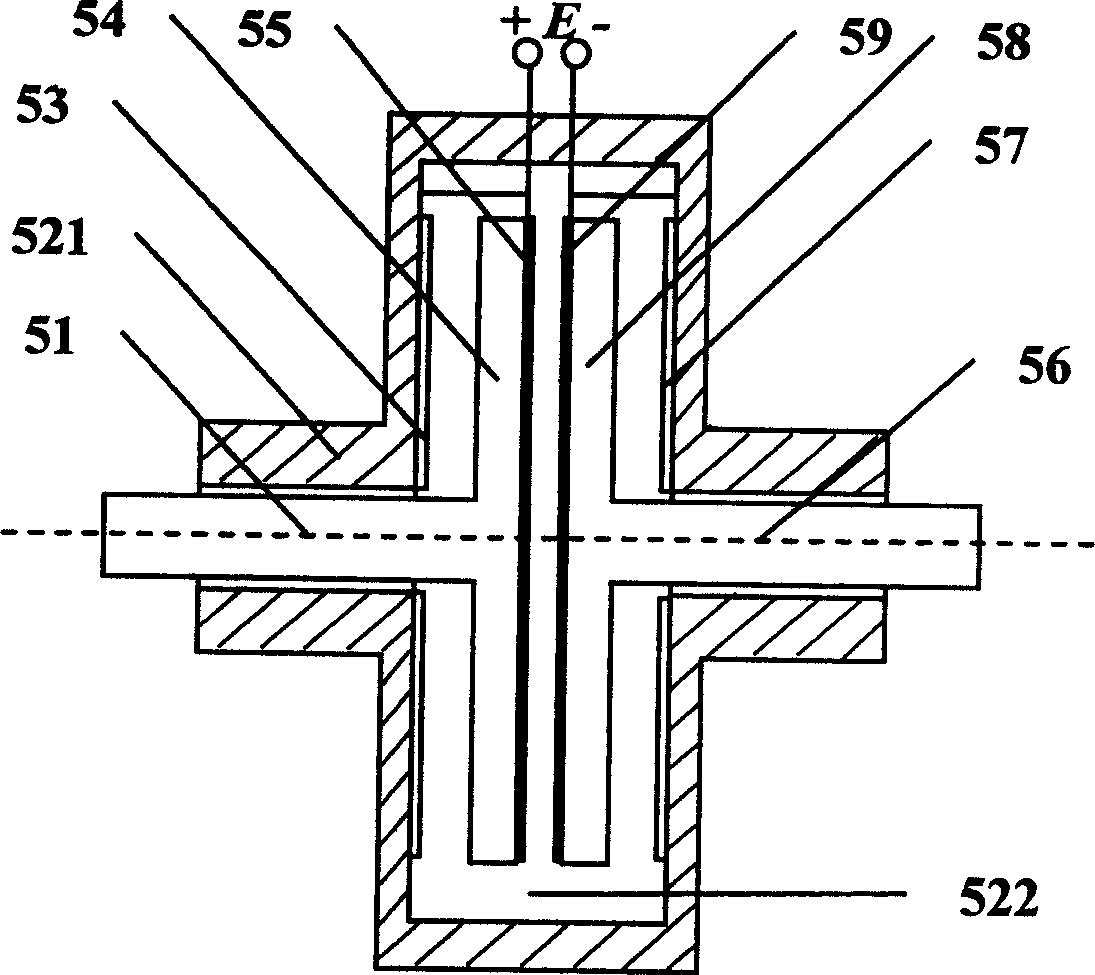
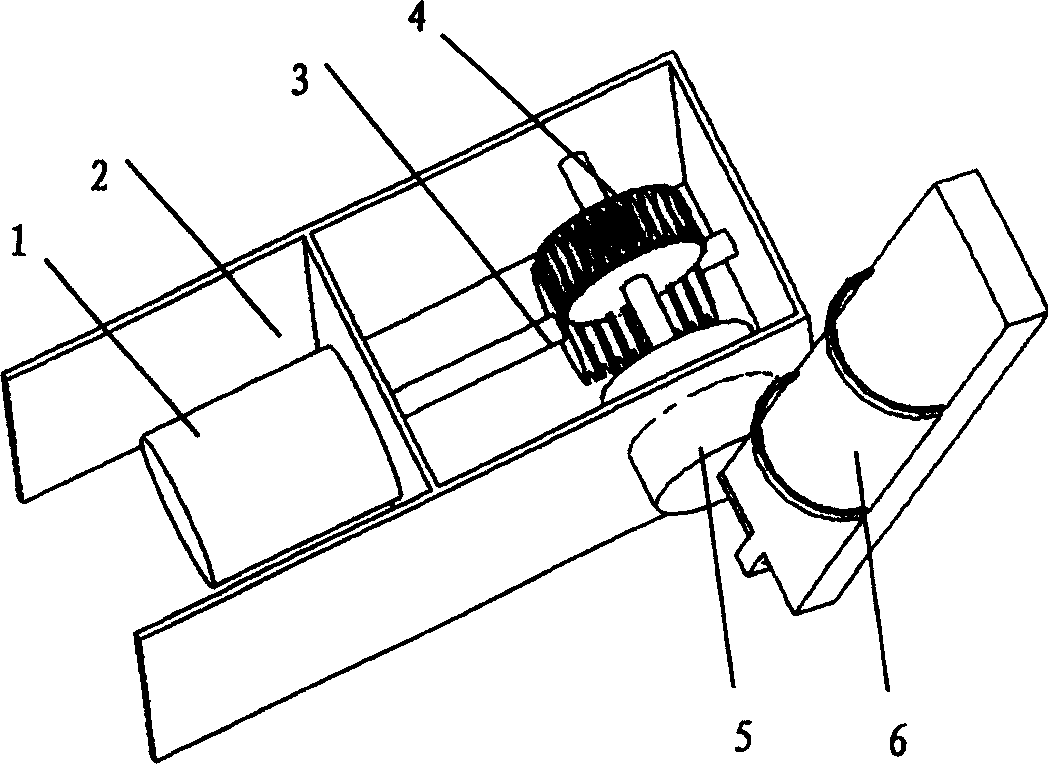
[0019] The joint mechanism of the rehabilitation training robot includes a motor 1 , a frame 2 , a reduction gear composed of a worm 3 and a worm wheel 4 , a clutch-damper 5 based on electrorheological fluid, and a mechanical arm 6 . Wherein, the motor 1 is fixed on the frame 2, the rotating shaft of the motor 1 is connected with the worm 3, the rotating shaft of the worm wheel 4 is connected with the driving shaft 51 of the clutch-damper 5, and the driven shaft 56 of the clutch-damper 5 is connected with the mechanical Arm 6 is linked. The rotation of the motor 1 drives the worm screw 3 to rotate. With the rotation of the worm screw 3, the worm wheel 4 on it will rotate perpendicular to the direction of rotation of the worm screw 3. Every time the worm screw rotates one circle, the wo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More