

Method for determining damage position of anchor rod system
A technology of damage location and determination method, which is applied to processing detection response signals, using sound waves/ultrasonic waves/infrasonic waves to analyze solids, etc., can solve the problem that it is difficult to determine the position and distribution of singular points in space, and the response cannot be known by time domain methods. It is difficult to accurately obtain the damaged position and other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
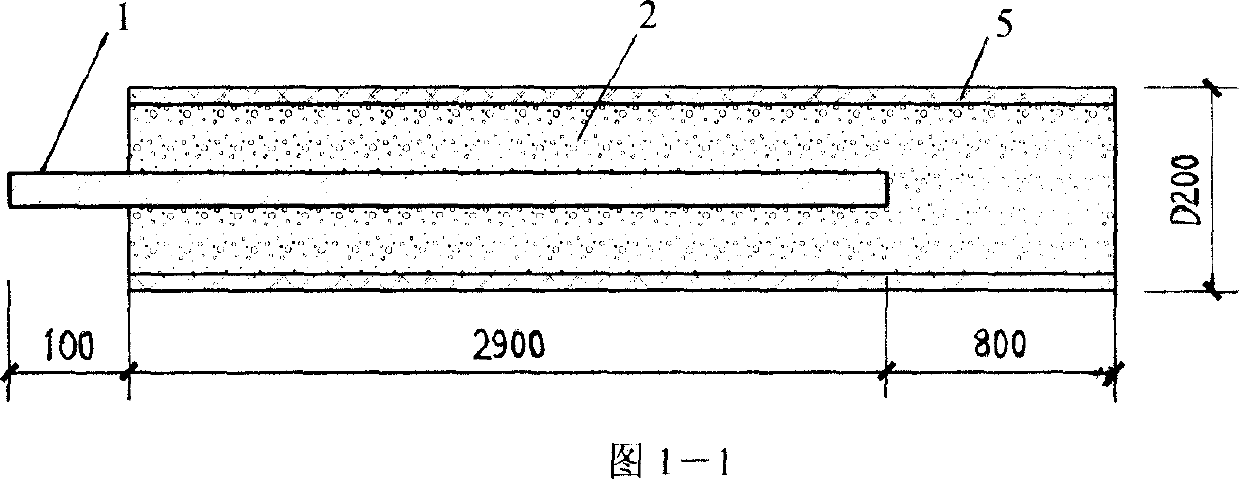
[0024] Example 1: Take a complete anchor rod with a length of 2.9 meters, as shown in Figure 1-1, and use the dynamic measurement signal obtained by hammering the end of the rod to illustrate the detection of the mutation point of the fault signal.
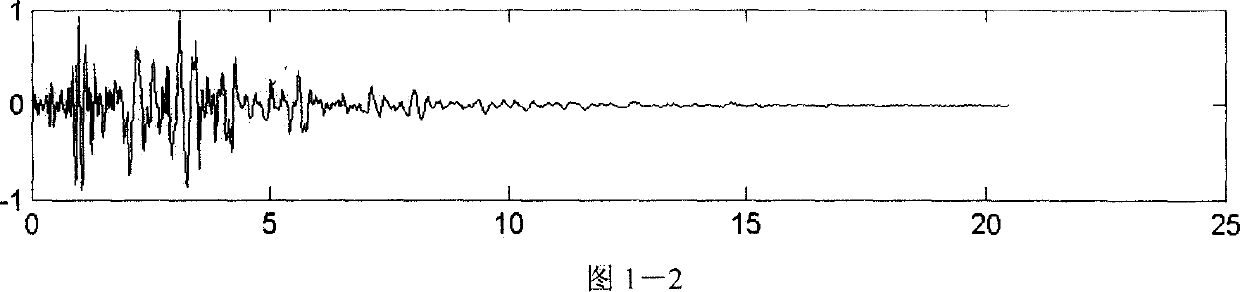
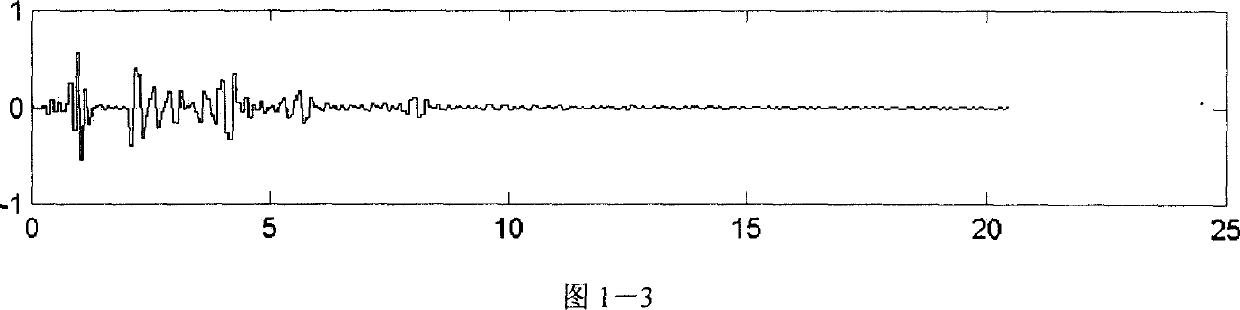
[0025] Considering that the sudden change of the signal produces a large number of high-frequency components, the electrical signal is first decomposed by wavelet, and then the high-frequency part of the signal is reconstructed to determine the sudden change of the signal. In this example, the wavelet decomposition and reconstruction function provided by MATLAB is used to process the signal. The original signal is shown in Figure 1-2. Here, the db1 wavelet function of the Daubechies wavelet series is used as the wavelet base for three-layer decomposition and reconstruction, as shown in Figure 1. -3. It can be seen that the change of the high-frequency component of the signal is more obvious, because the mutation point must contain...
Embodiment 2
[0030] Embodiment 2: Take a damaged anchor rod model 1, see 2-1, its length is 2.9 meters, there are two damage interfaces, the position is located at 1 meter and 1.9 meters respectively from the rod end, and the resulting dynamic force of the rod end is hammered. The test signal is used to illustrate the detection of the mutation point of the fault signal.
[0031] 1. For the measured bolt time domain signal u(s, t) (see Figure 2-2), use the db1 wavelet function of the Daubechies wavelet series to decompose and reconstruct the three-layer wavelet packet, as shown in Figure 2- 3;
[0032] 2. Perform threshold de-noising processing on the high-frequency coefficients of the obtained signal;
[0033] 3. Perform single-branch reconstruction on the high-frequency coefficient part of the signal after denoising processing, and obtain the reconstructed waveform diagram, as shown in Figure 2-4;
[0034] 4. From the reconstructed waveform diagram, identify the position t of the incide...
Embodiment 3
[0043] Embodiment 3: Take a damaged anchor rod model 2, see 3-1, its length is 2.9 meters, there are two damage interfaces, the position is located at 1 meter and 1.9 meters respectively from the rod end, and the dynamic force obtained by hammering the rod end The test signal is used to illustrate the detection of the mutation point of the fault signal.
[0044] The same method as in Example 2 is used for detection, and the relevant detection diagrams of Fig. 3-2 to Fig. 3-4 are obtained, and it can be obtained from Fig. 3-4:
[0045] t 0 = 0.14ms, t 1 = 0.55ms, t 2 = 0.89ms, t 1 =1.29ms, the calculated result is:
[0046] First damage interface position: L 1 =C·(t 1 -t 0 ) / 2=5054×(0.55-0.14) / 2×10 -3 =1.036m
[0047] Second damage interface position: L 2 =C·(t 2 -t 0 ) / 2=5054×(0.55-0.14) / 2×10 -3 =1.895m
[0048] Anchor length: L=C (t e -t 0 ) / 2=5054×(1.29-0.14) / 2×10 -3 =2.906m
[0049] It can be further confirmed by the above calculation results that the resu...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Length | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More