Exoskeleton, orthosis, wearable device or mobile robots using magnetorheological fluid clutch apparatus
a technology of magnetorheological fluid clutch and exoskeleton, which is applied in the field of exoskeletons or orthoses/orthotics, can solve the problems of inconvenience for users, disruption of device function, and relatively low mechanical bandwidth of actuator types
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
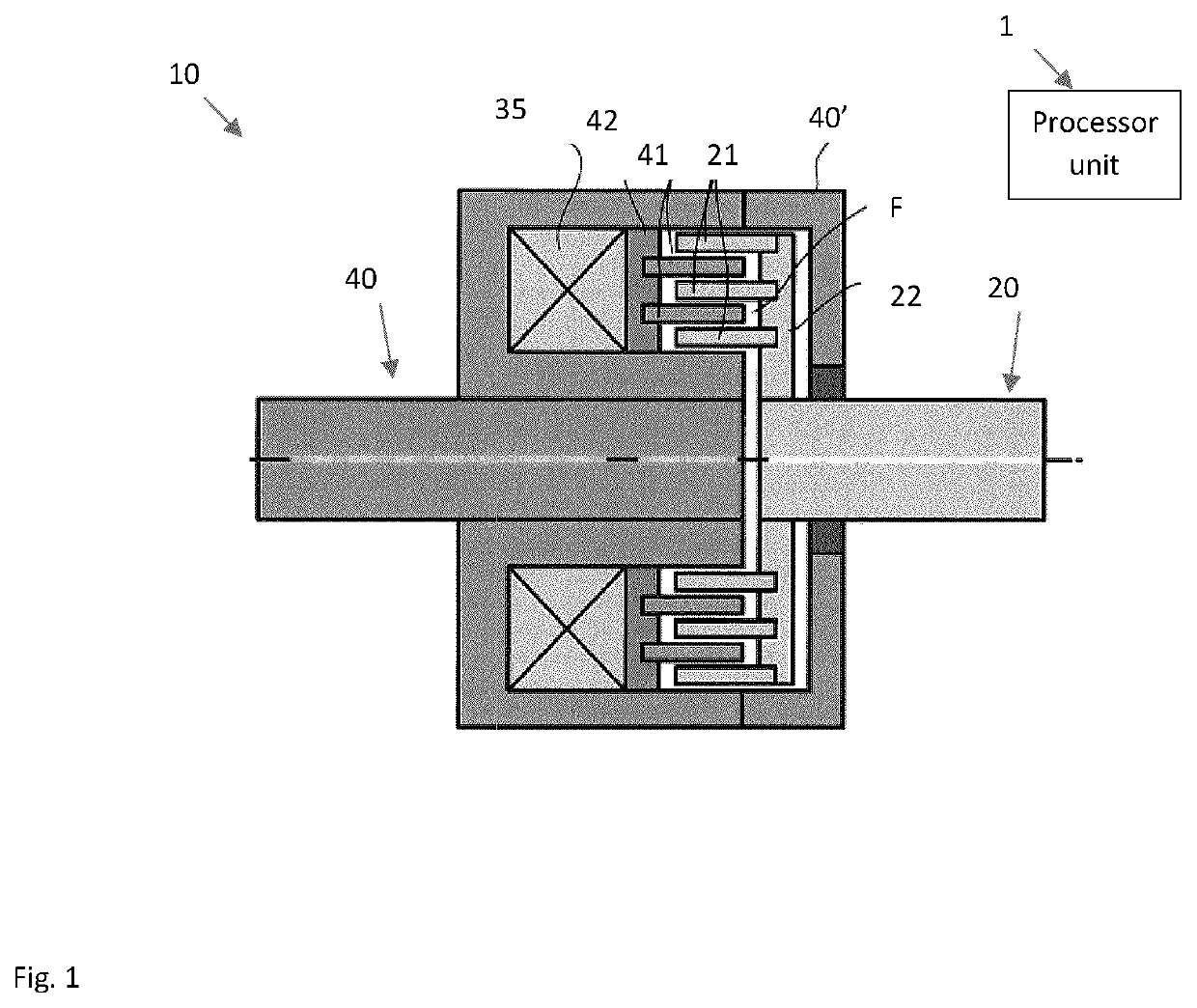
[0096]Referring to FIG. 1, there is illustrated a generic magnetorheological (MR) fluid clutch apparatus 10 configured to provide a mechanical output force based on a received input current provided by a processor unit 1 controlling the MR fluid clutch apparatus 10. The processor unit 1 is any type of electronic or electric device having controlling capability to control input current sent to the MR fluid clutch apparatus 10. In an embodiment, the processor unit 1 may receive signals from sensors, and compute data, for instance by way of firmware, to control the operation of the MR fluid clutch apparatus 10 based on settings, on requested assistance, etc, as will be explained hereinafter. The MR fluid clutch apparatus 10 has a driving member 20 with a disk 22 from which project drums 21 in an axial direction, this assembly also known as input rotor 20. The MR fluid clutch apparatus 10 also has a driven member 40 with a disk 42 from which project drums 41 intertwined with the drums 2...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com