

Driving joint for cross axle type robot based on shape memory alloy
A technology of memory alloy and cross shaft, which is applied in the field of machinery, can solve the problems of less freedom and low tensile strength, and achieve the effects of reducing errors, improving comprehensive performance, simplifying structure and control links
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
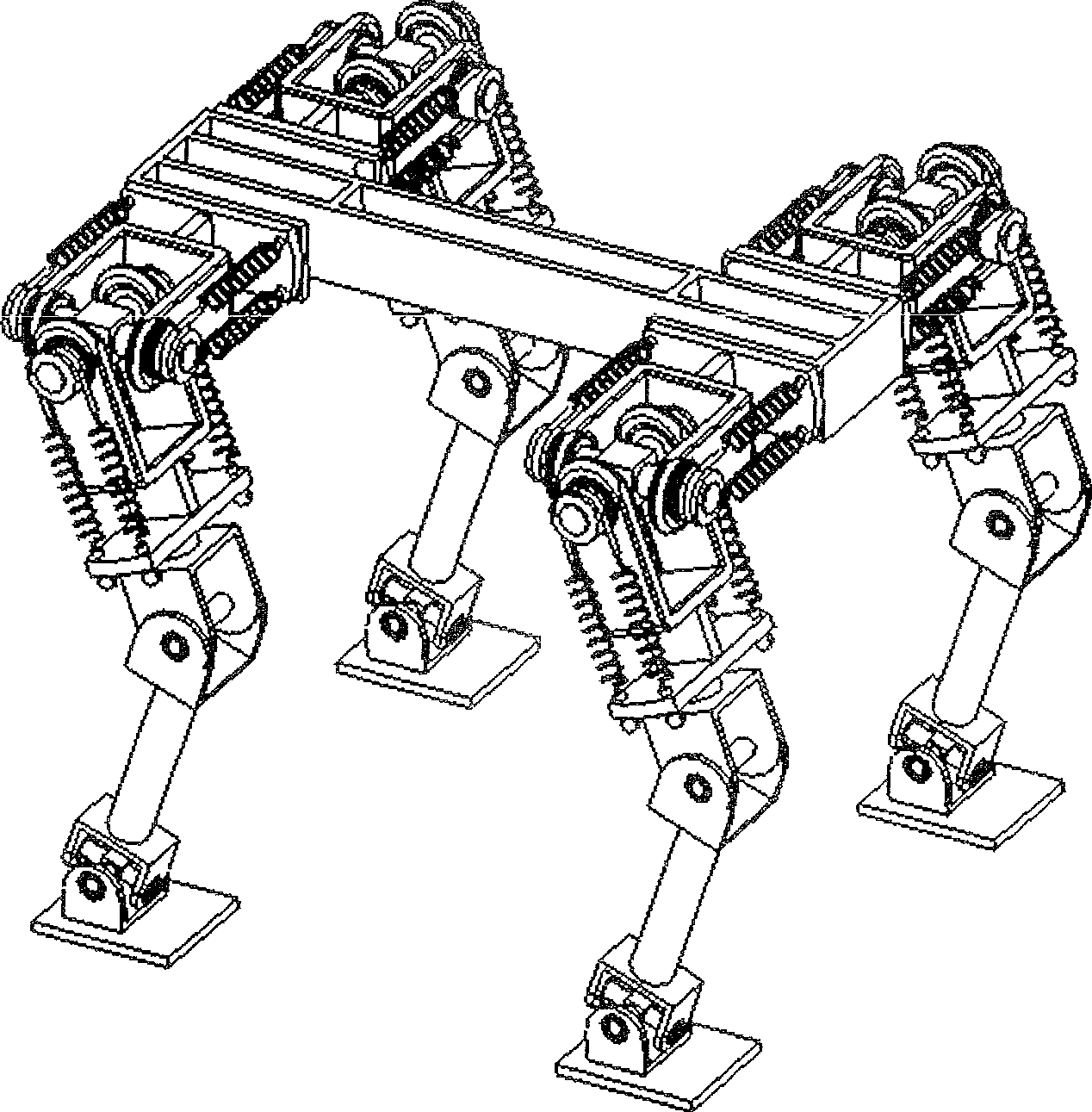
[0021] Device embodiment: refer to figure 2 , taking a quadruped robot as an example, adopt the present invention to design the hip joint. The design requirements of the quadruped robot for the hip joint are shown in Table 1.
[0022] Table 1 Drive joint design requirements
[0023] Single degree of freedom angular displacement / . Output torque / Nm Load capacity / kg Robot weight / kg Structure sizeL / mm -60~60 30~60 25~40 25~30 L≤150
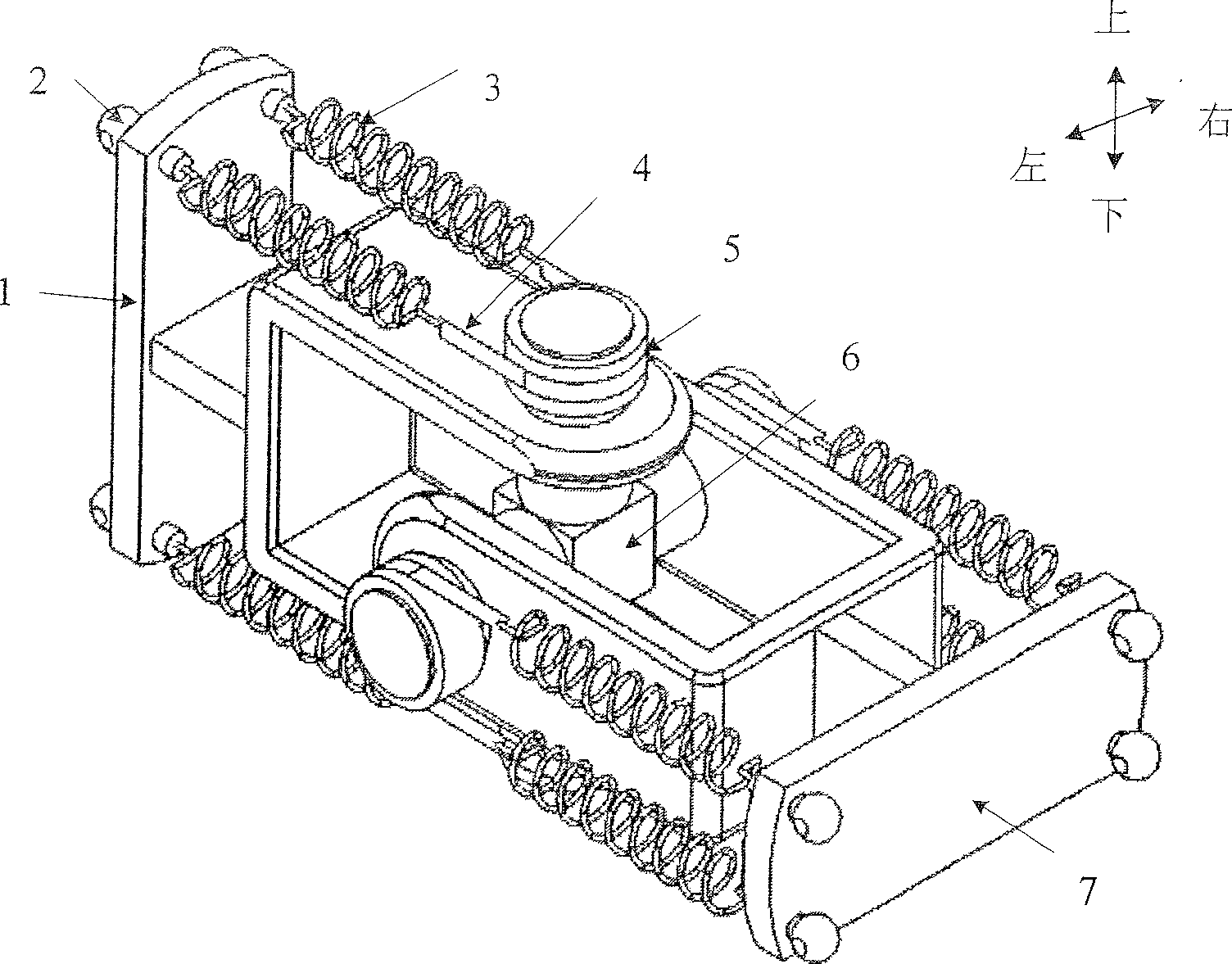
[0024] The structural main body of the present invention is a Hooke hinge mechanism, which is composed of a fixed hinge frame 1, a cross shaft 6, and a movable hinge frame 7. The four pulleys 5 are respectively fixed on the four shoulders of the cross shaft 6, and the four shafts of the cross shaft 6 The shoulders are respectively socketed on the round holes of the side walls of the fixed hinge frame 1 and the movable hinge frame 7, and rolling bearings are installed at the joints between the shoulders and the round ho...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More