

Large condenser underwater operation environment two-joint robot control method
A technology of underwater operation and control method, which is applied in the direction of adaptive control, general control system, control/regulation system, etc., and can solve problems such as difficulty in ensuring control accuracy, inability to obtain robot motion models, and complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0069] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
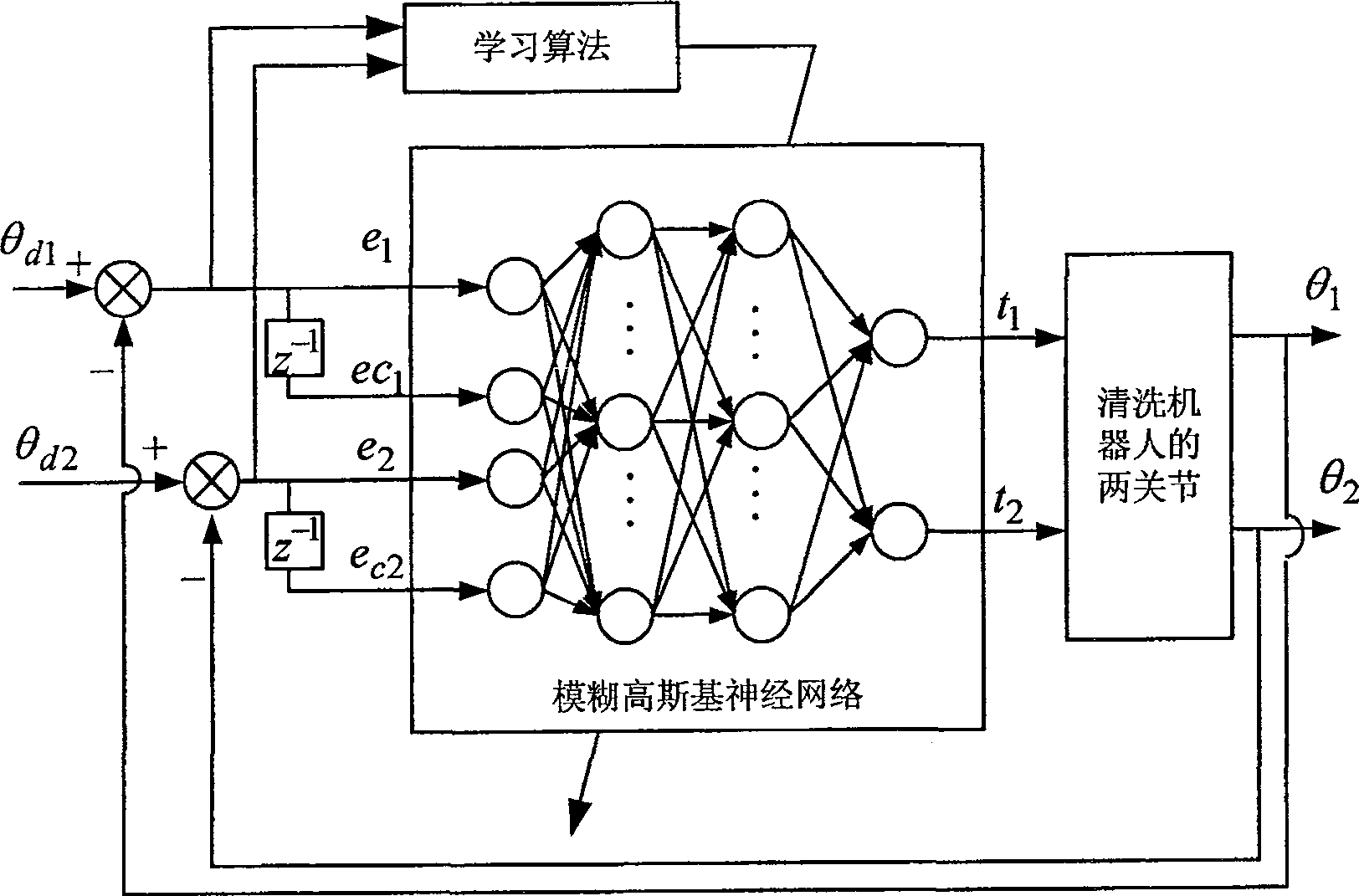
[0070] Such as Figure 8 As shown in the present invention, a control method of a two-joint robot under a large condenser underwater working environment, the steps are:
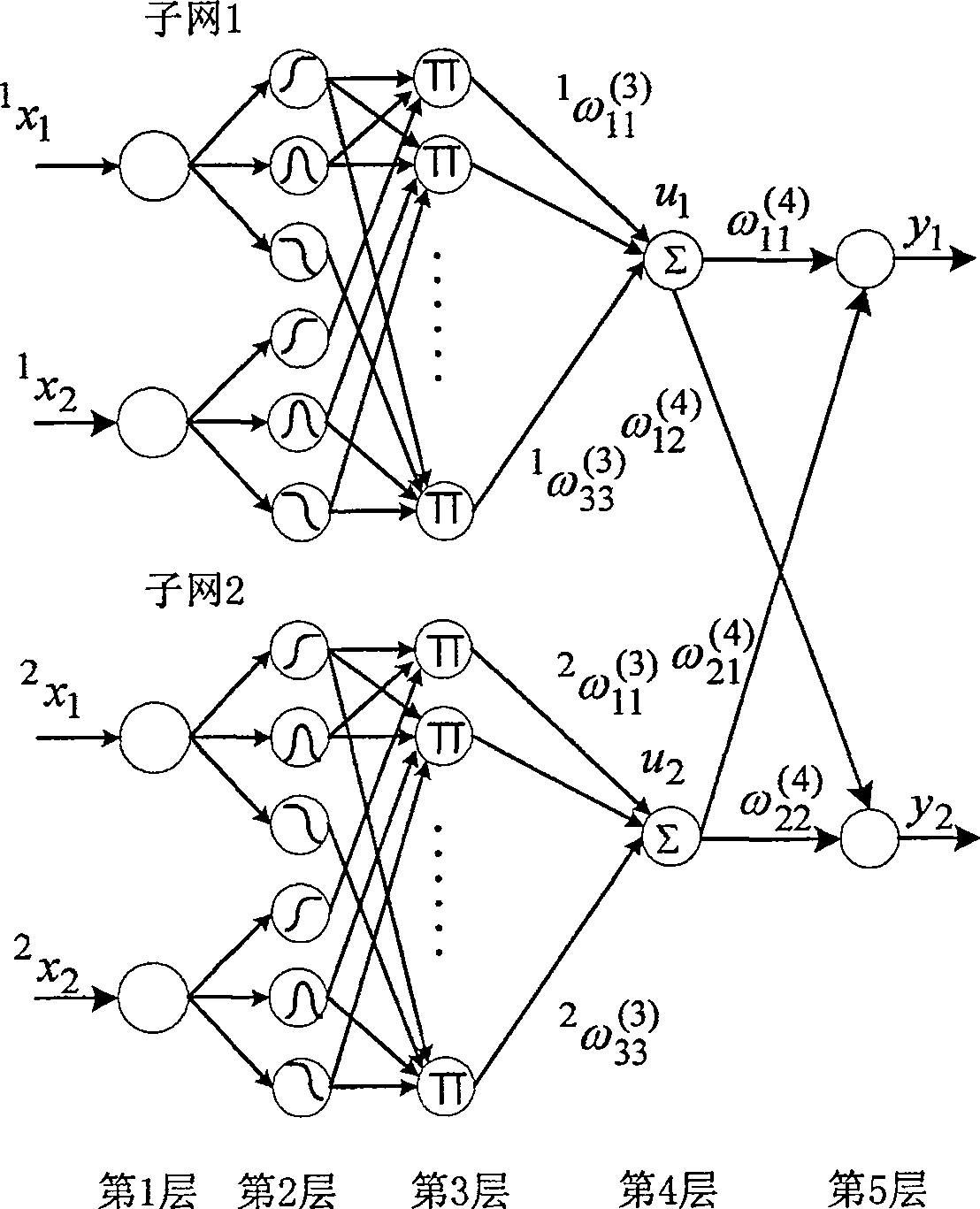
[0071] (1), establish the fuzzy Gaussian neural network controller structure, the whole network is divided into two subnetworks, each subnetwork represents the servo controller of a joint, considering the coupling between the joints, the output u of the two subnetworks 1 and u 2 Multiplied by the corresponding impact factors to get the output y of the entire network 1 and y 2 ;
[0072] (2) Initialize the parameters of the control system and network weights, take the control cycle T value, and obtain the current angular displacement of the robot's two joints (θ 1 , θ 2 ), and through the expected positioning coordinates, calculate the expected motion angular di...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More