Civil aviation ground-air communication self-adaptive disturbance restraining method based on the single channel and its system
An interference suppression and self-adaptive technology, applied in the direction of modulated carrier system, transmission system, digital transmission system, etc., can solve difficult technical and method problems, achieve low cost, broad market application prospects, and improve the effect of anti-interference performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
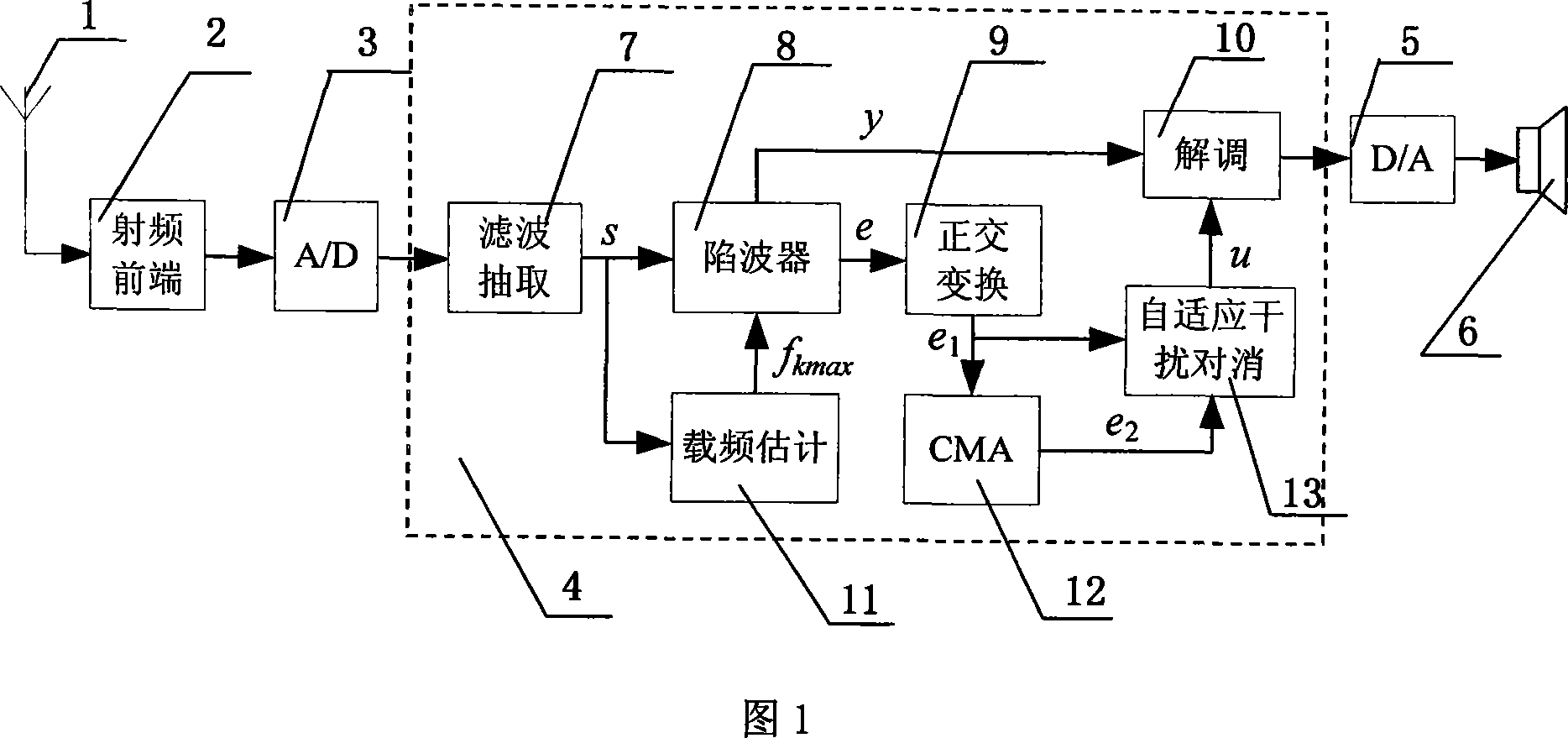
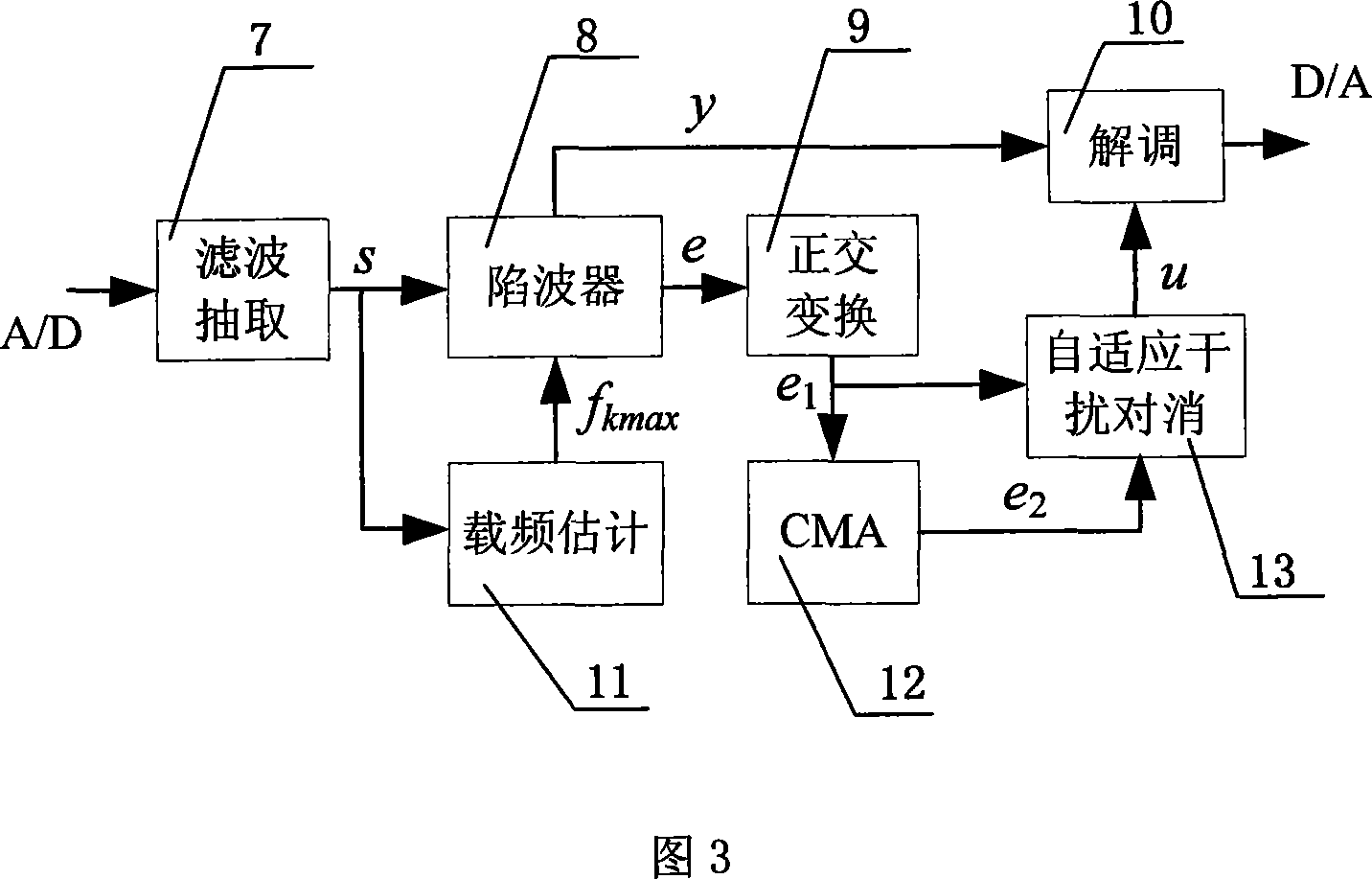
[0027] The single-channel-based civil aviation ground-air communication adaptive interference suppression method and system thereof of the present invention will be described in detail below with reference to the accompanying drawings and specific embodiments.
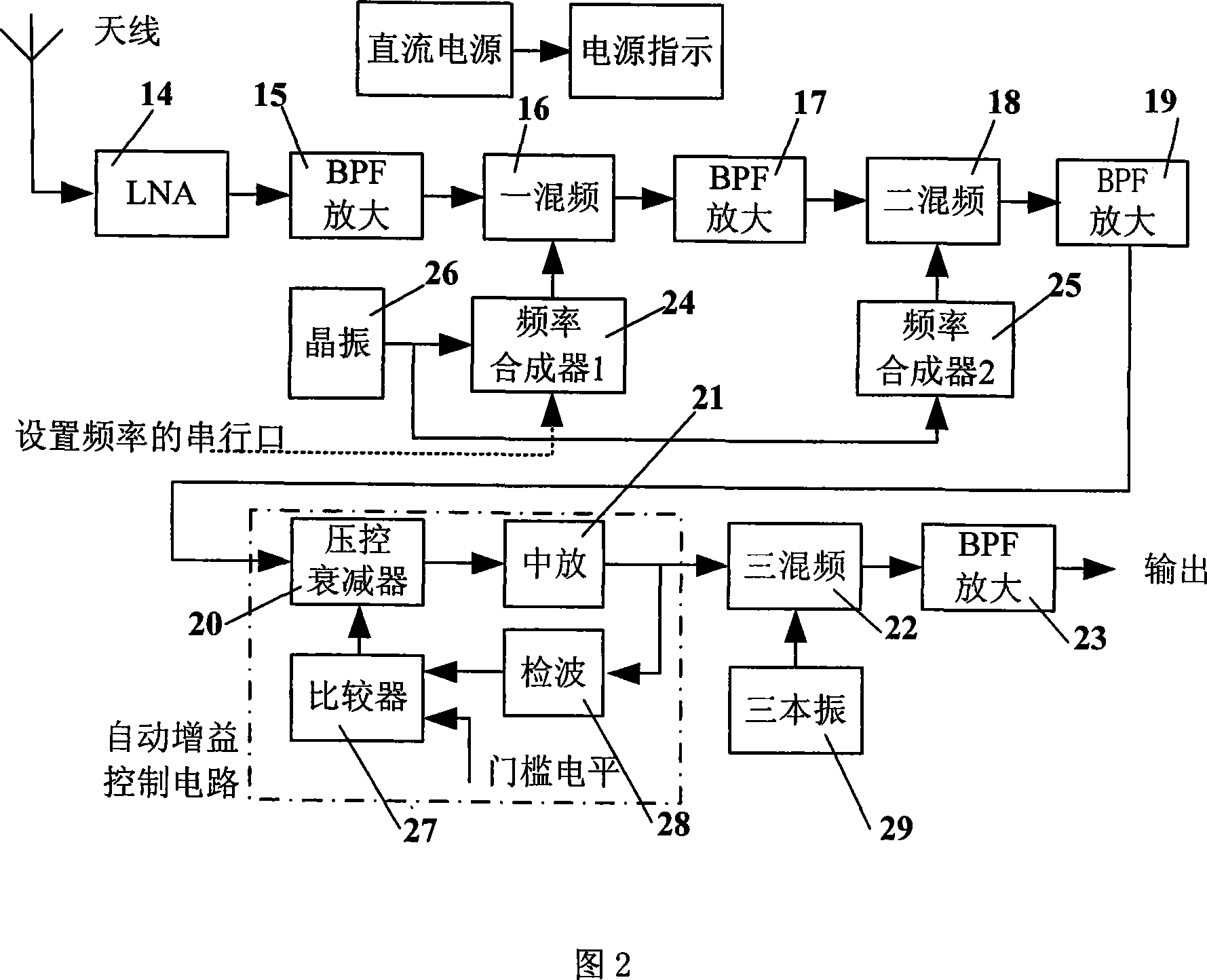
[0028] In order to further understand the present invention, below in conjunction with the technical characteristics of the civil aviation VHF (very high frequency) ground-to-air communication station, the specific implementation process of the present invention is given a detailed introduction.
[0029] The technical characteristics of VHF ground-to-air communication devices are specified in Volume I of Annex 10 of the International Convention. The radio adopts DSB-AM (double sideband amplitude modulation with carrier) and half-duplex communication. Its operating frequency range is 118.0MHz to 136.975MHz, and the channel spacing is 25KHz. It can provide 760 communication channels. These channels can be used in Reuse i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com