

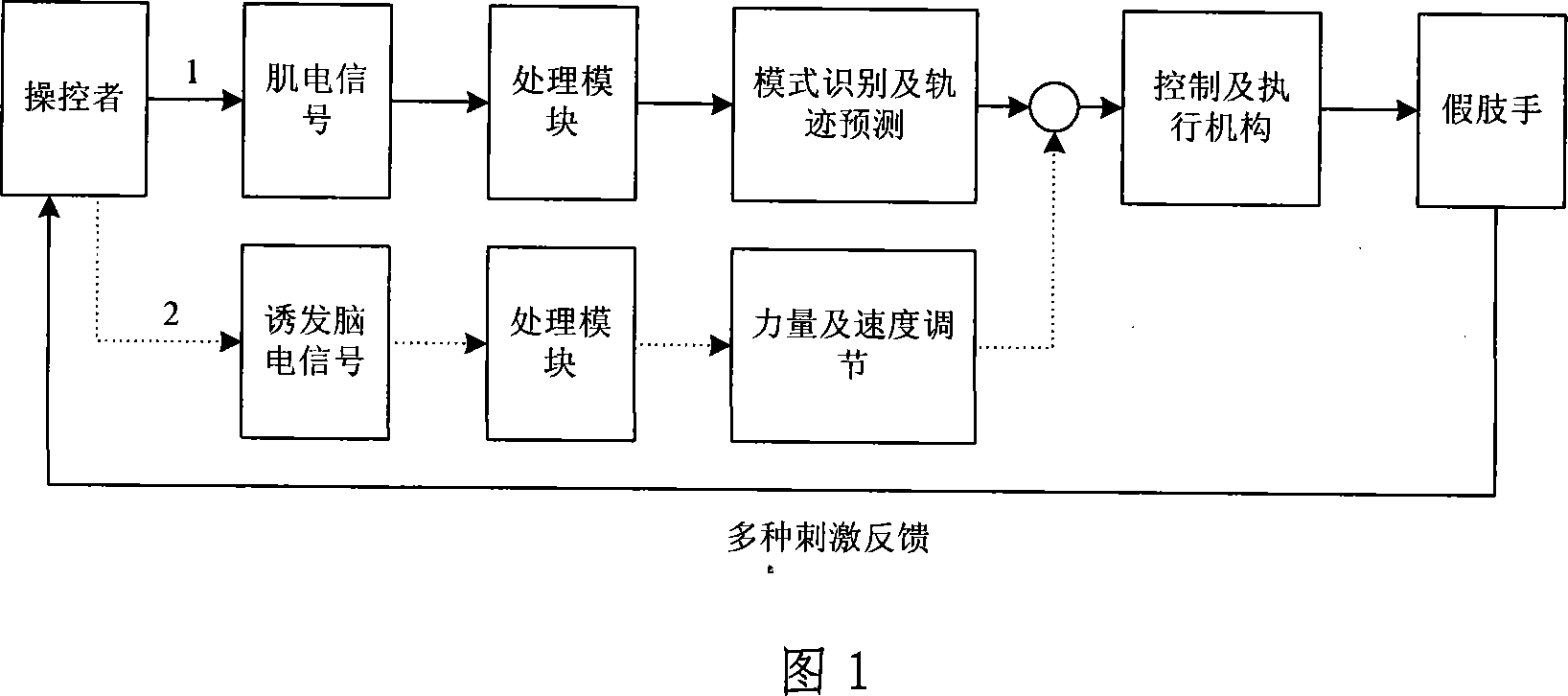
Artificial hand using muscle electrical and electroencephalogram cooperative control and controlling method thereof
A collaborative control and prosthetic hand technology, applied in the field of human hand replacement and its control, can solve the problems of poor accuracy and repeatability of information patterns, muscle fatigue, and inability to provide sufficient myoelectric control information, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
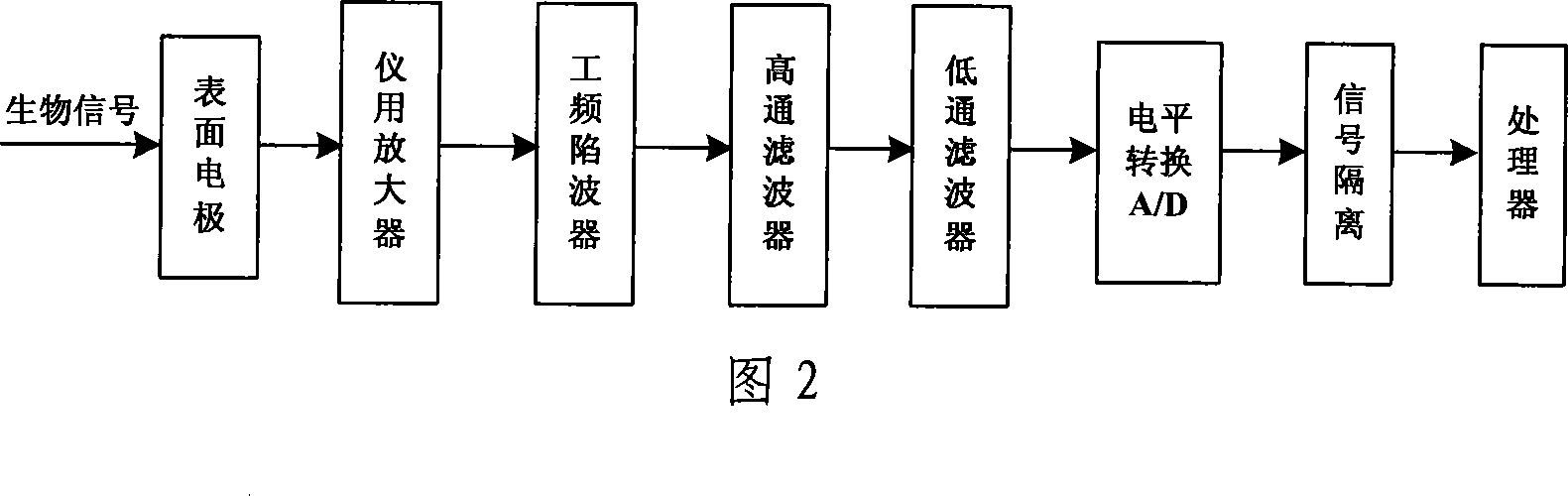
[0028] The system first collects the EMG signal through the processing module. As shown in Figure 2, the amplification and filtering functions of the acquisition system are realized in four stages. The first stage uses an instrument amplifier to amplify the collected biological signal dozens of times. The second stage adopts a passive double-T notch circuit, and the resistance and capacitance of the circuit are matched to filter out 50Hz interference well. The third stage uses a high-pass filter to filter out the DC potential generated by the polarization potential. The fourth stage uses a low-pass filter to filter out high-frequency interference. The cut-off frequency of the EEG signal is set at 30Hz, and the cut-off frequency of the EMG signal is set at 500Hz. This filter also acts as an anti-aliasing filter before A / D conversion. Considering the safety of the human body, high-speed digital optocoupler isolation is used in the circuit.
[0029] Then feature extraction and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More