

Non-singular completely isotropic space mobile parallel mechanism
A completely isotropic, space-moving technology, applied in the field of three-degree-of-freedom robots and space-moving measuring machines, can solve problems such as singular configurations and strong kinematic coupling, and achieve large working space, broad application prospects, and low cost Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
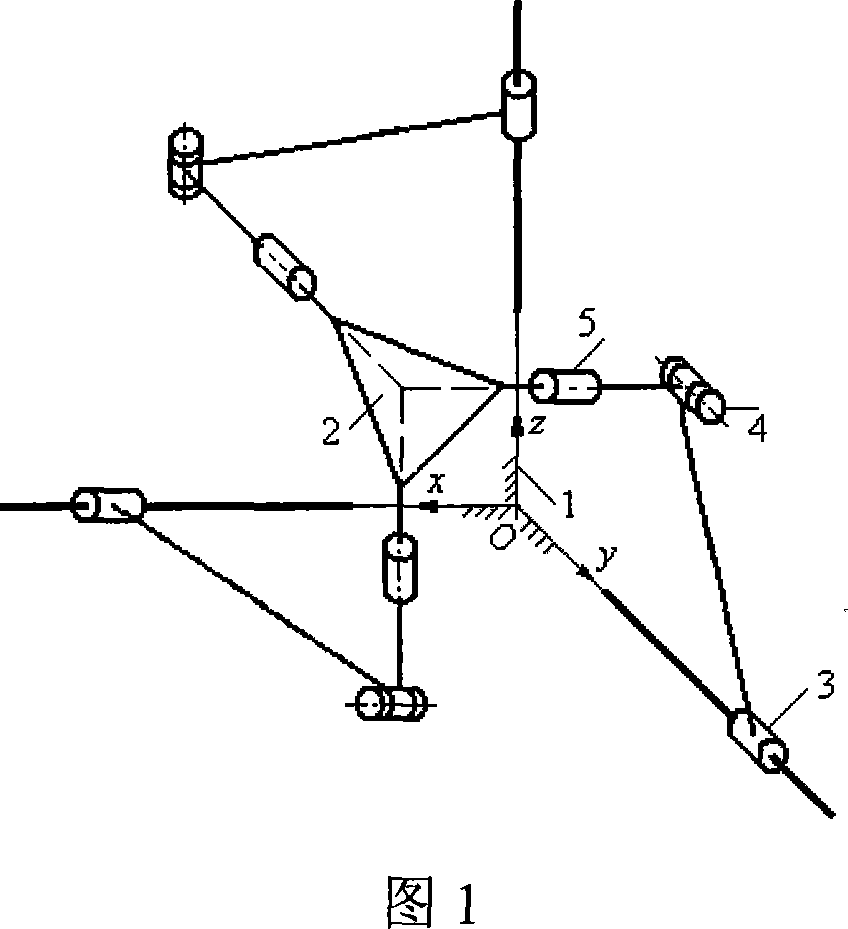
[0018] The singularity-free and completely isotropic space mobile parallel mechanism of the present invention, as shown in Fig. 1, includes a moving platform 2, a fixed platform 1 as a frame, and the same three branches connecting the fixed platform 1 and the moving platform 2. Each branch includes a first cylinder pair 3 connected to the fixed platform 1, the first cylinder pair 3 is connected with a rotating pair 4 parallel to its axis, and the rotating pair 4 is also connected with a second cylinder pair 5 perpendicular to its axis. , The other end of the second cylinder pair 5 is connected to the moving platform 2. The axes of the same three first cylinder pairs 3 on the three branch roads perpendicularly intersect the fixed platform 1. The moving platform 2 is an equilateral triangle, and the three branches The axes of the connected second cylinder pairs 5 are perpendicular to each other and converge at one point. The three branches all use the first cylinder pair 3 as the ac...
Embodiment 2
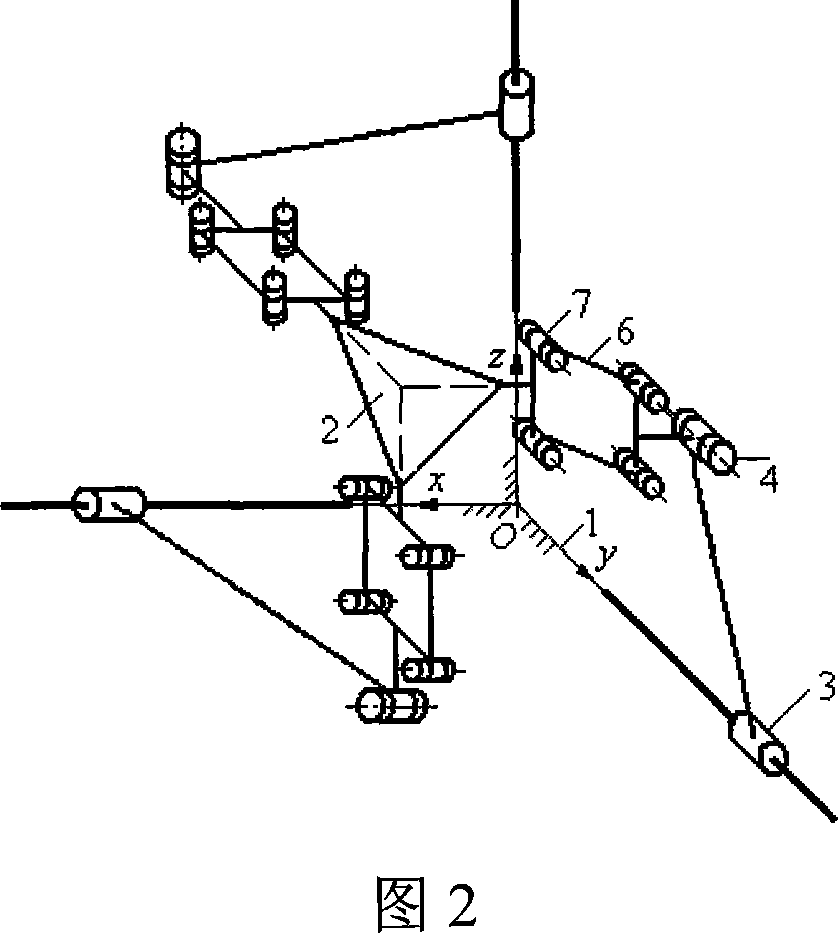
[0020] As shown in Figure 2, the second cylindrical pair 5 in each branch is replaced by a plane parallelogram mechanism 6 composed of four second rotating pairs 7, that is, each branch has one first cylindrical pair 3 and one rotating pair. The auxiliary 4 is composed of a plane parallelogram mechanism 6, and the axis of the rotating pair 4 is parallel to the axis of the second rotating pair 7 constituting the plane parallelogram mechanism 6.
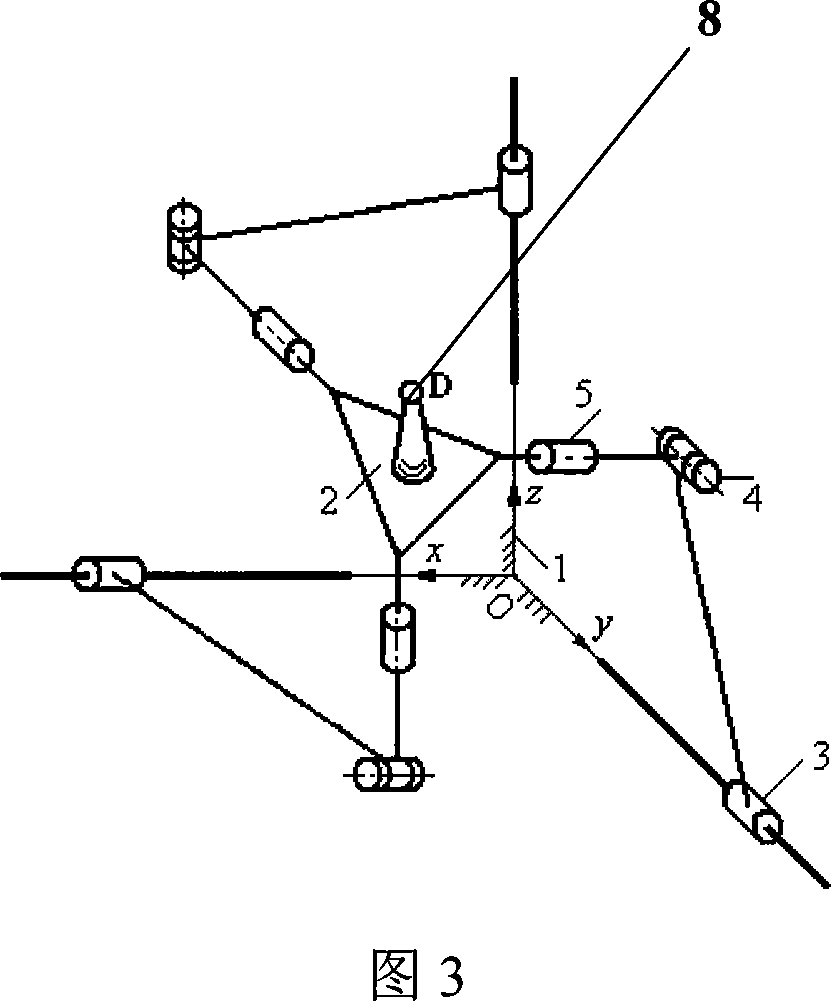
[0021] When the present invention is used in a coordinate measuring machine, a measuring head D is installed on the moving platform 2, as shown in Fig. 3. When the dimension parameters of each member of the mechanism are determined, the linear input of the three active first cylinder pairs 3 on the fixed platform 1 is controlled Movement, the spatial coordinate position of the measuring head D on the moving platform can be determined, which is the actuator of the virtual axis coordinate measuring machine, and the movement of the measuring ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More