

Cable length/force-based large-size cables structure parallel robot cable regulating method
A robot and rope technology, which is applied in the field of adjusting the length of parallel robot ropes, can solve problems such as heavy weight, narrow receiving bandwidth, and low tracking accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
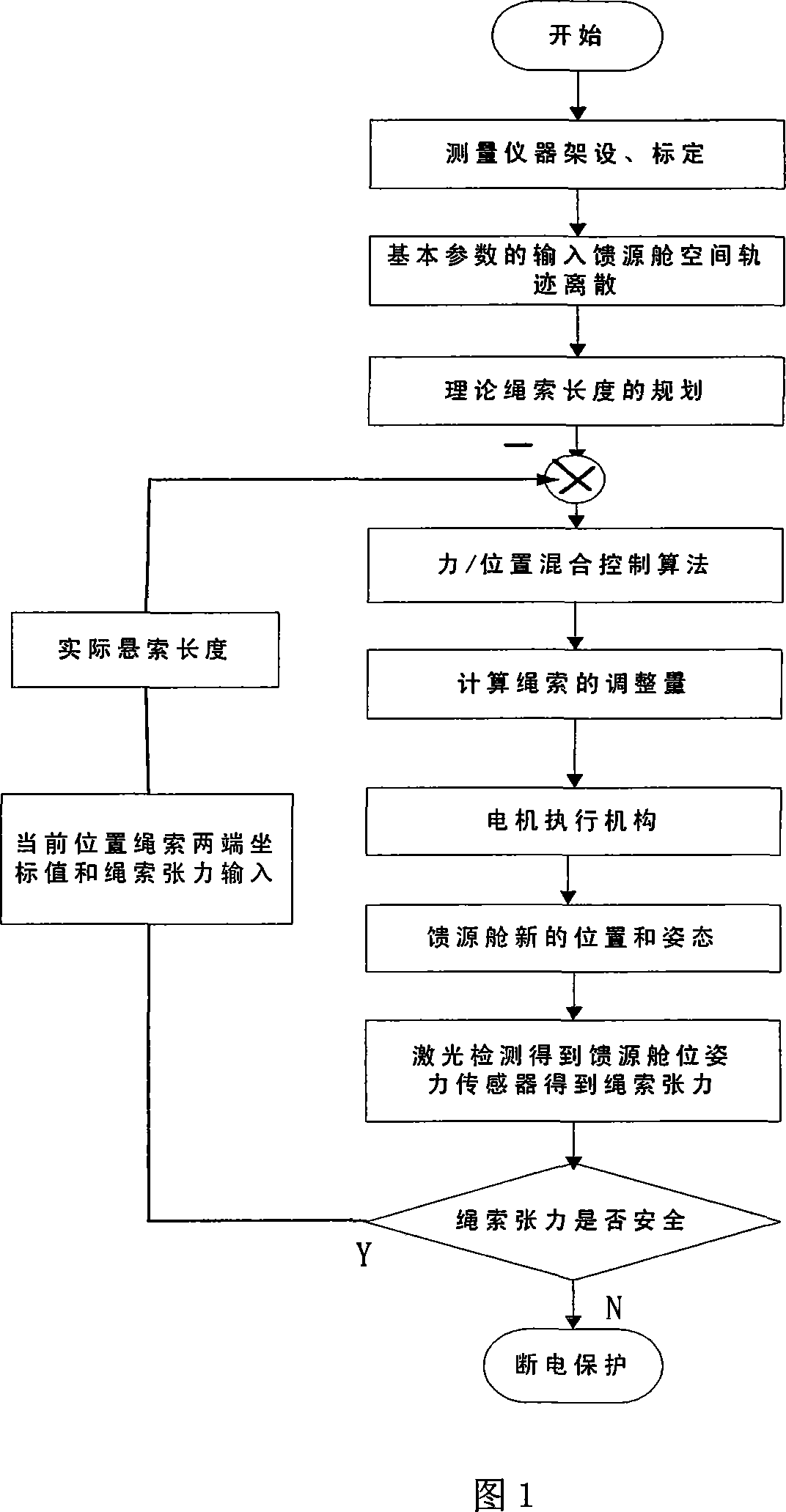
[0101] Referring to Figure 1, the rope adjustment process of the present invention is as follows:
[0102] 1. Set up measuring instruments to calibrate site coordinates and tower top coordinates
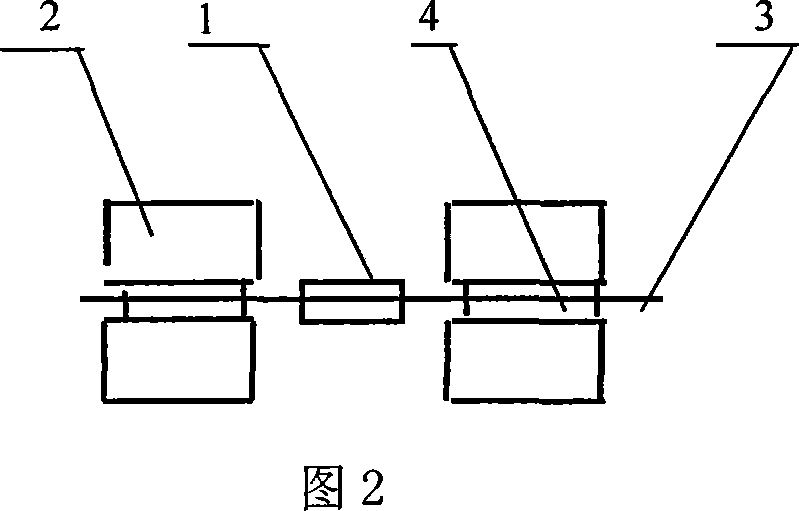
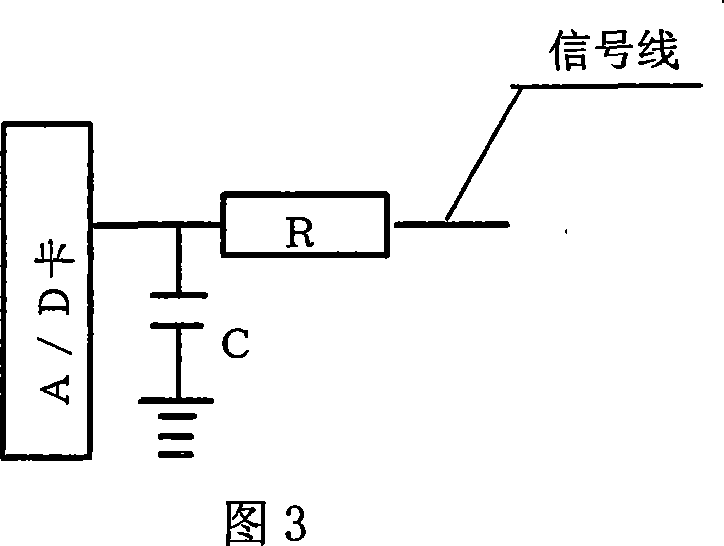
[0103] The measuring instrument includes 3 laser total stations and 6 force sensors. The 3 laser total stations are respectively fixed on 3 brackets. After calibration, the 3 lenses are respectively aligned with the 3 prisms installed on the bottom surface of the feed cabin. The 6 tension sensors are respectively fixed on the suspension tower of 6 ropes, and the two ends of the force sensor are respectively equipped with directional wheels 2. The two directional wheels are fixed on the suspension tower, and each directional wheel has a ring of grooves. 4. The tested rope 3 passes through the force sensor and is placed in the groove 4 to ensure that the shape of the rope measured by the rope force sensor remains unchanged, as shown in Figure 2. In order to eliminate the electromagnetic in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More