

Simulation device of robot system
A robot system and simulation device technology, applied in the field of simulation devices, can solve problems such as many operations, low efficiency, and multi-operation man-hours
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] An embodiment of the simulator 30 of the robot system 10 of the present invention will be described below with reference to the drawings.
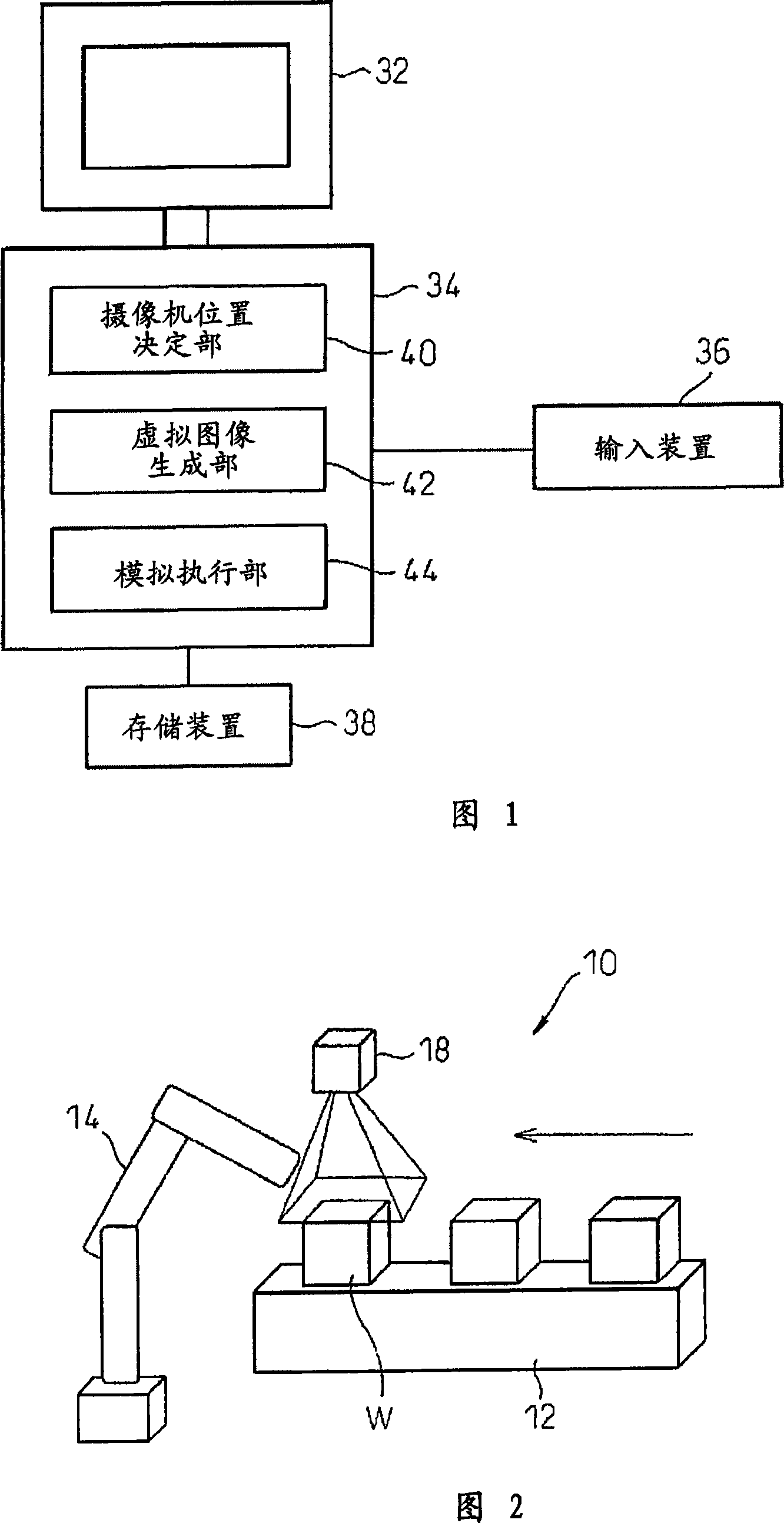
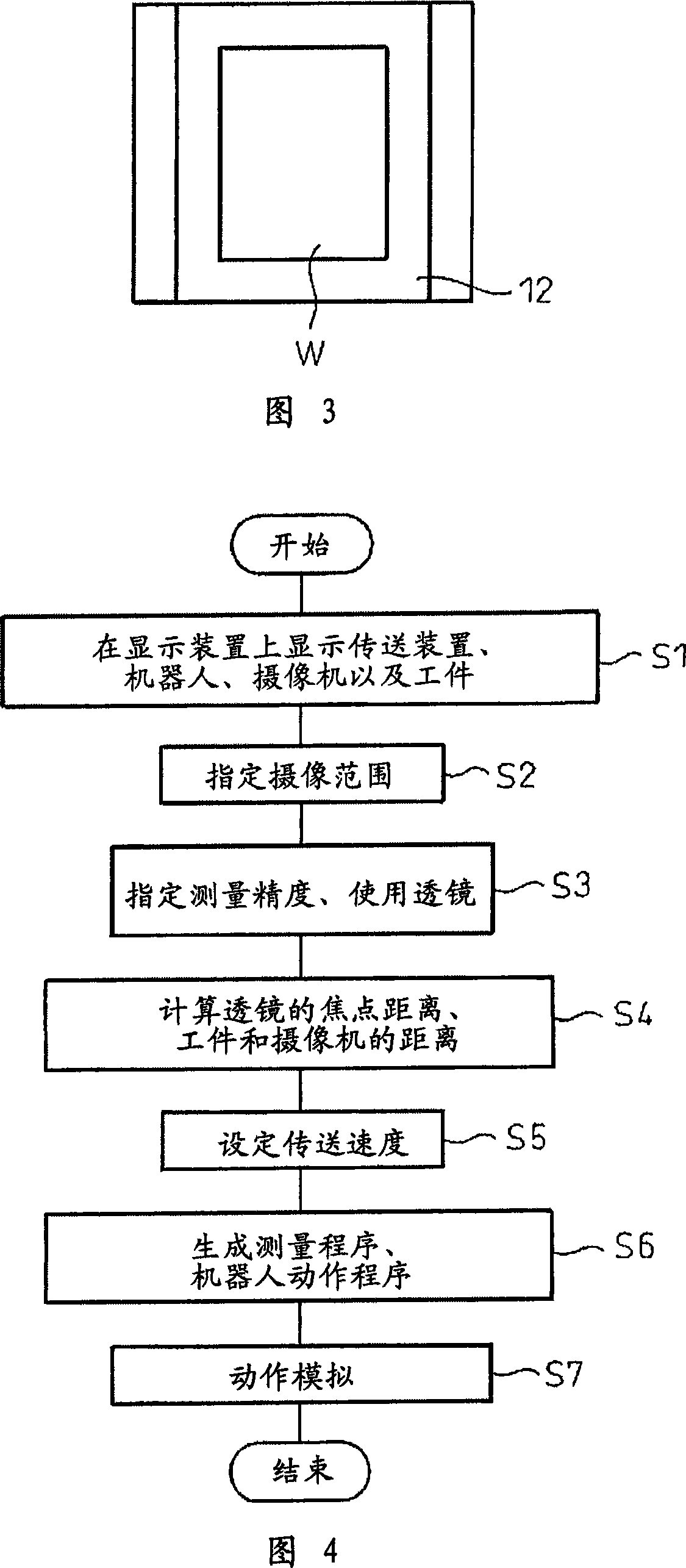
[0021] First, an example of the robot system 10 simulated by the simulation device 30 of the present invention will be described with reference to FIG. 2 . The robot system 10 has: a conveying device 12 for conveying a workpiece W as a work object, a robot 14 for performing predetermined processing such as a gripping action on the workpiece W conveyed to a predetermined position by the conveying device 12, and a robot 14 for detecting or measuring A visual recognition device 16 for the position of the workpiece W or a specific part thereof. As the conveying device 12, suitable conveying devices such as a conveying belt or a conveying roller can be used. Any type can be used for the robot 14, and it is not particularly limited.
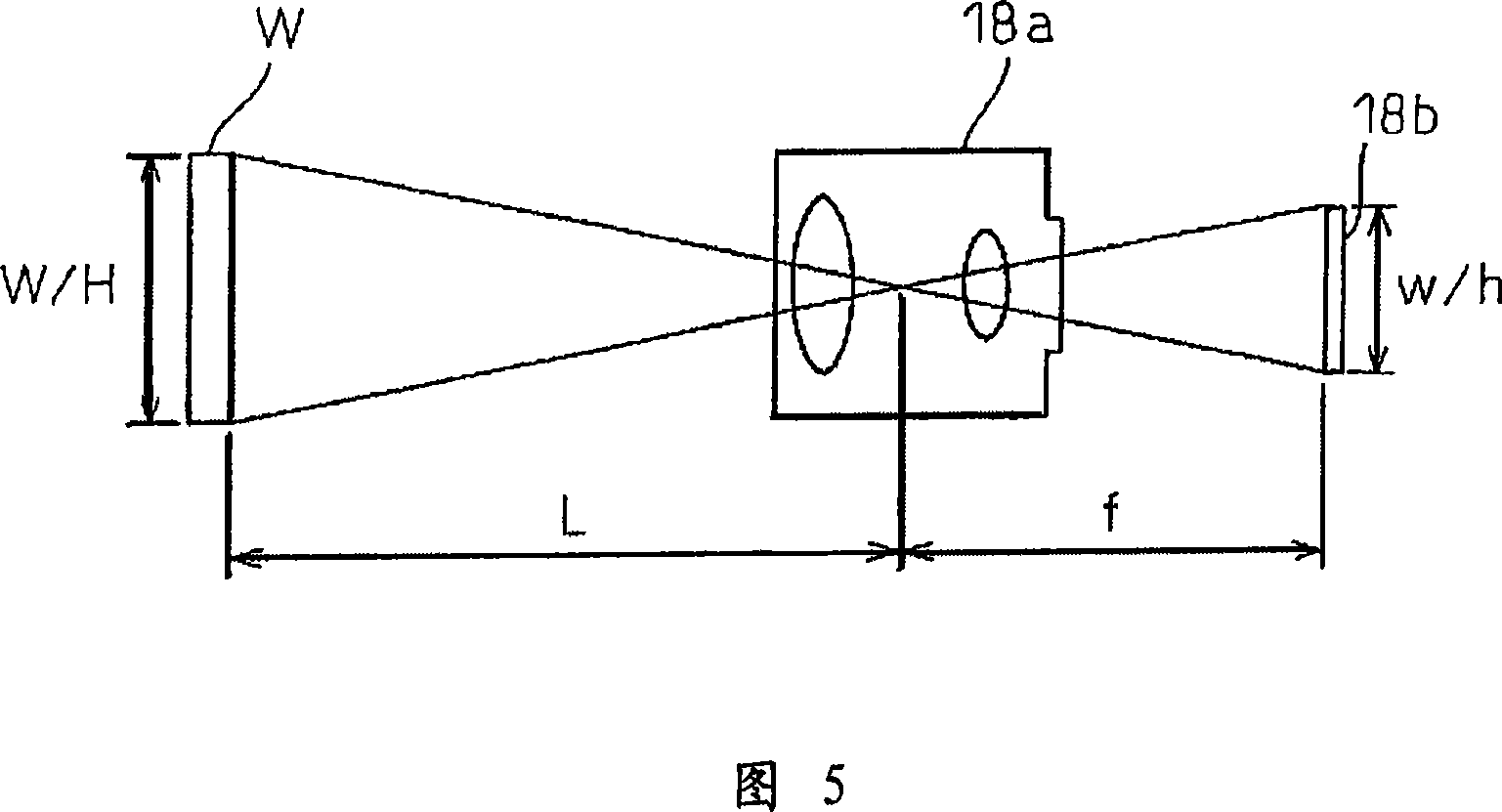
[0022] The visual recognition device 16 is constituted by a camera 18 for obtaining an image, and an im...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More