

Three-dimensional scanning system circular index point detection method
A detection method and three-dimensional scanning technology, which is applied in the fields of image processing and computer vision, can solve the problems of false detection of landmark points, difficult selection of segmentation threshold, and large amount of calculation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
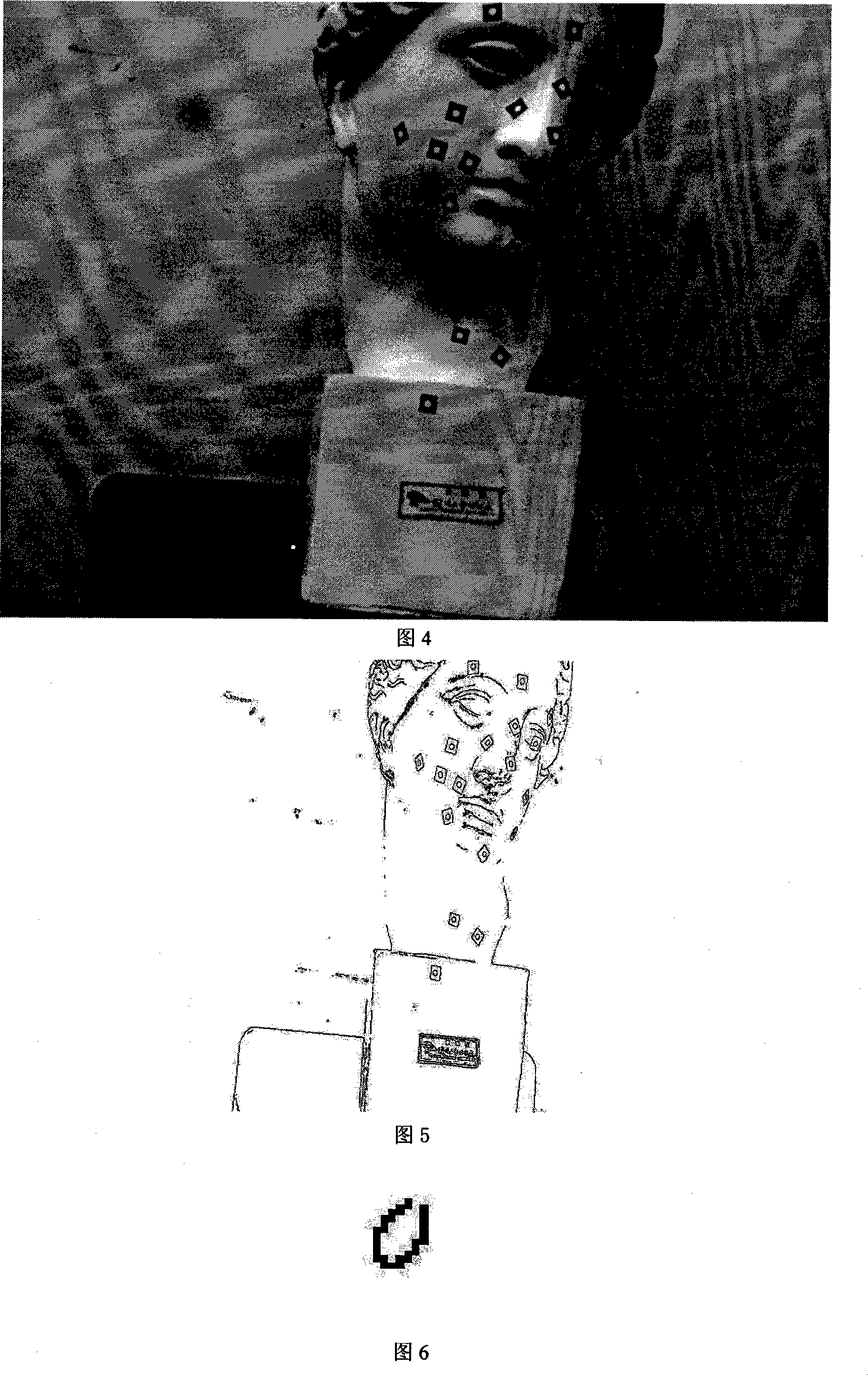
[0064] The specific implementation manners of the present invention will be further described below in conjunction with the drawings. The programming tool selects Visual C++6.0. The head of Venus is selected as the measured object for measurement, because the surface of the head is complex, and multiple splicing is required to obtain a complete surface. A standard circle with a radius of 5mm is selected as the mark point. If the small mark point has other shapes, select an appropriate description The operator can still use the landmark detection algorithm based on the boundary continuous closed area feature verification and adaptive threshold verification proposed by the present invention.
[0065] 1. Acquire images and preprocess them
[0066] Figure 4 is the image of the Venus head model taken. The edge of the image is detected by the classic Canny edge operator, and the edge map of the image is shown in Figure 5. The edge map of the image is composed of edge pixels and non...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More